 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Robust Learning Methodology for Uncertainty-aware Scientific Machine Learning models
Sep 05, 2022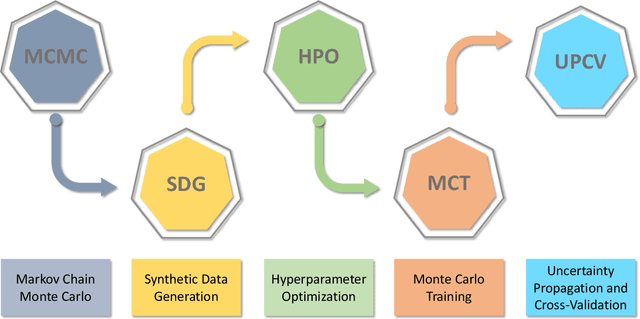

Robust learning is an important issue in Scientific Machine Learning (SciML). There are several works in the literature addressing this topic. However, there is an increasing demand for methods that can simultaneously consider all the different uncertainty components involved in SciML model identification. Hence, this work proposes a comprehensive methodology for uncertainty evaluation of the SciML that also considers several possible sources of uncertainties involved in the identification process. The uncertainties considered in the proposed method are the absence of theory and causal models, the sensitiveness to data corruption or imperfection, and the computational effort. Therefore, it was possible to provide an overall strategy for the uncertainty-aware models in the SciML field. The methodology is validated through a case study, developing a Soft Sensor for a polymerization reactor. The results demonstrated that the identified Soft Sensor are robust for uncertainties, corroborating with the consistency of the proposed approach.
Low-latency Perception in Off-Road Dynamical Low Visibility Environments
Dec 23, 2020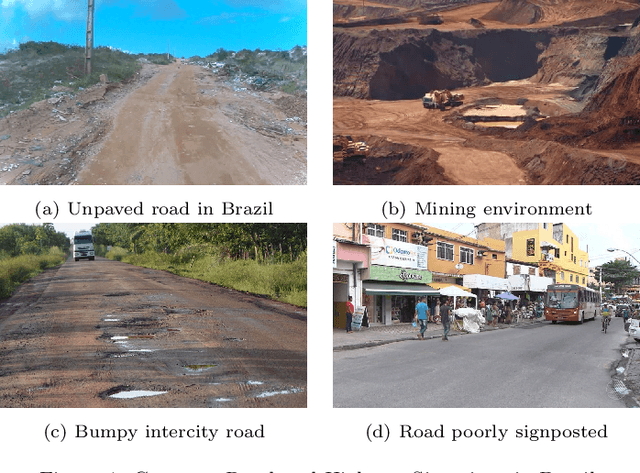
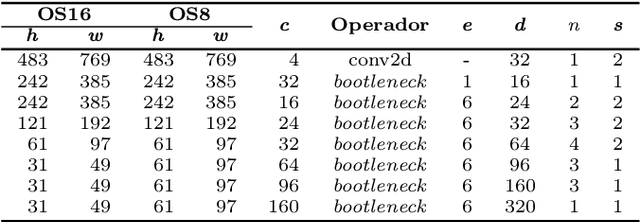
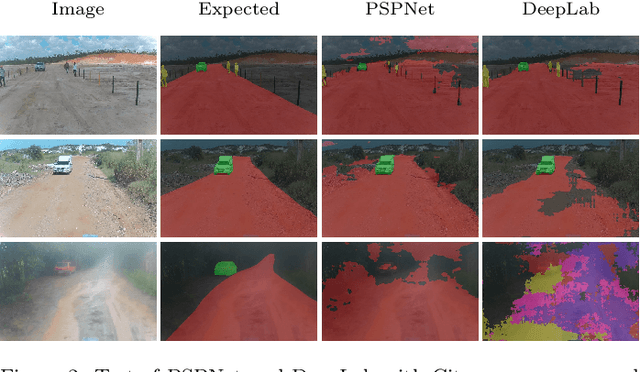
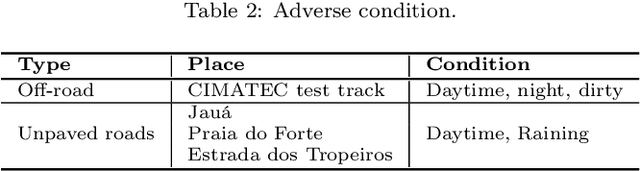
This work proposes a perception system for autonomous vehicles and advanced driver assistance specialized on unpaved roads and off-road environments. In this research, the authors have investigated the behavior of Deep Learning algorithms applied to semantic segmentation of off-road environments and unpaved roads under differents adverse conditions of visibility. Almost 12,000 images of different unpaved and off-road environments were collected and labeled. It was assembled an off-road proving ground exclusively for its development. The proposed dataset also contains many adverse situations such as rain, dust, and low light. To develop the system, we have used convolutional neural networks trained to segment obstacles and areas where the car can pass through. We developed a Configurable Modular Segmentation Network (CMSNet) framework to help create different architectures arrangements and test them on the proposed dataset. Besides, we also have ported some CMSNet configurations by removing and fusing many layers using TensorRT, C++, and CUDA to achieve embedded real-time inference and allow field tests. The main contributions of this work are: a new dataset for unpaved roads and off-roads environments containing many adverse conditions such as night, rain, and dust; a CMSNet framework; an investigation regarding the feasibility of applying deep learning to detect region where the vehicle can pass through when there is no clear boundary of the track; a study of how our proposed segmentation algorithms behave in different severity levels of visibility impairment; and an evaluation of field tests carried out with semantic segmentation architectures ported for real-time inference.