 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Simulation to Field: Learning Terrain Traversability for Real-World Deployment
Jan 12, 2025



The challenge of traversability estimation is a crucial aspect of autonomous navigation in unstructured outdoor environments such as forests. It involves determining whether certain areas are passable or risky for robots, taking into account factors like terrain irregularities, slopes, and potential obstacles. The majority of current methods for traversability estimation operate on the assumption of an offline computation, overlooking the significant influence of the robot's heading direction on accurate traversability estimates. In this work, we introduce a deep neural network that uses detailed geometric environmental data together with the robot's recent movement characteristics. This fusion enables the generation of robot direction awareness and continuous traversability estimates, essential for enhancing robot autonomy in challenging terrains like dense forests. The efficacy and significance of our approach are underscored by experiments conducted on both simulated and real robotic platforms in various environments, yielding quantitatively superior performance results compared to existing methods. Moreover, we demonstrate that our method, trained exclusively in a high-fidelity simulated setting, can accurately predict traversability in real-world applications without any real data collection. Our experiments showcase the advantages of our method for optimizing path-planning and exploration tasks within difficult outdoor environments, underscoring its practicality for effective, real-world robotic navigation. In the spirit of collaborative advancement, we have made the code implementation available to the public.
Cloud Hopping; Navigating in 3D Uneven Environments via Supervoxels and Control Lyapunov Function
Oct 06, 2022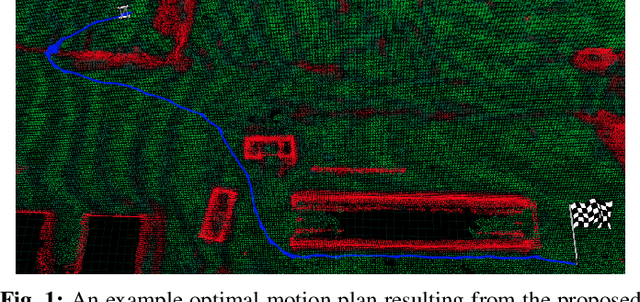
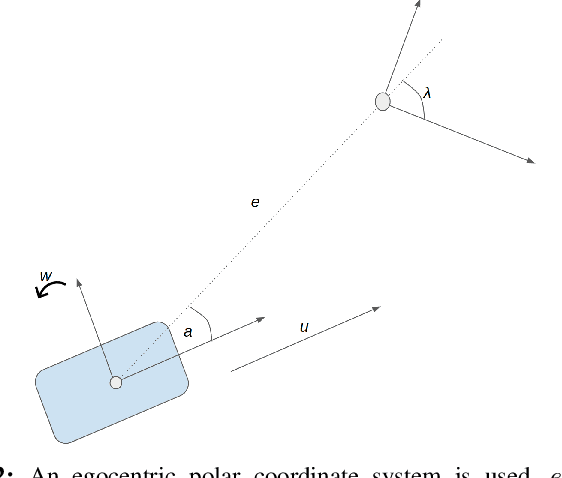
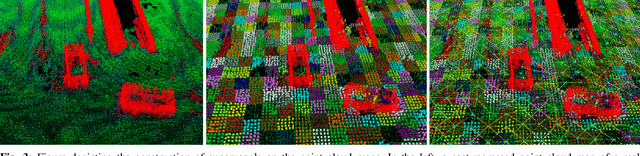
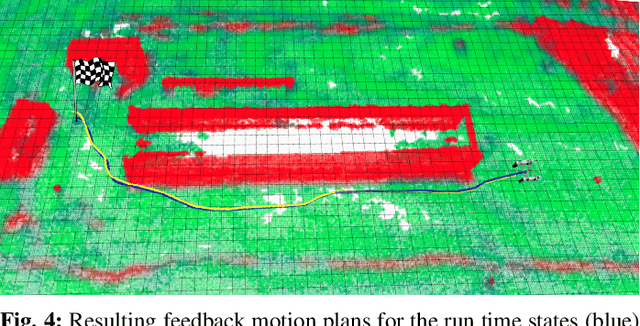
This paper presents a novel feedback motion planning method for mobile robot navigation in 3D uneven terrains. We take advantage of the \textit{supervoxel} representation of point clouds, which enables a compact connectivity graph of traversable regions on the point cloud maps. Given this graph of traversable areas, our approach navigates the robot to any reachable goal pose using a control Lyapunov function (cLf) and a navigation function. The cLf ensures the kinodynamic feasibility and target convergence of the generated motion plans, while the navigation function optimizes the resulting feedback motion plans. We carried out navigation experiments in real and simulated 3D uneven terrains. In all circumstances, the experimental findings show that our approach performs superior to the baselines, proving the approach's efficiency and adaptability to navigate a robot in challenging uneven 3D terrains. The proposed method can also navigate a robot with a particular objective, e.g., shortest-distance or least-inclined plan. We compared our approach to well-established sampling-based motion planners in which our method outperformed all other planners in terms of execution time and resulting path length. Finally, we provide an open-source implementation of the proposed method to benefit the robotics community.
Elevation State-Space: Surfel-Based Navigation in Uneven Environments for Mobile Robots
Aug 17, 2022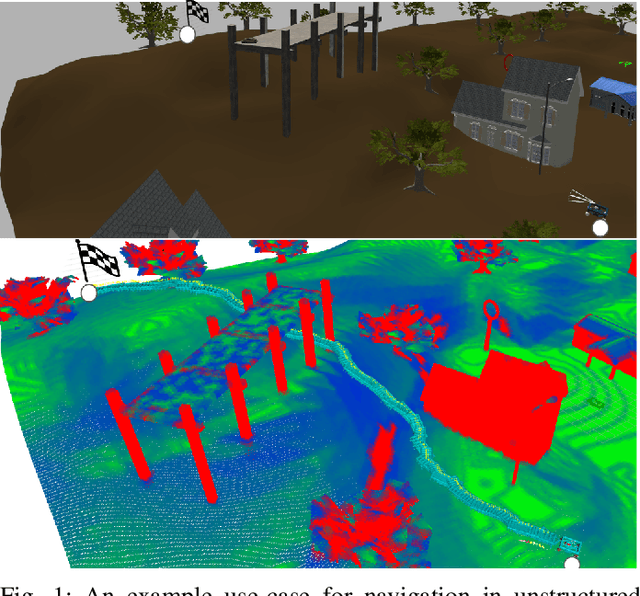
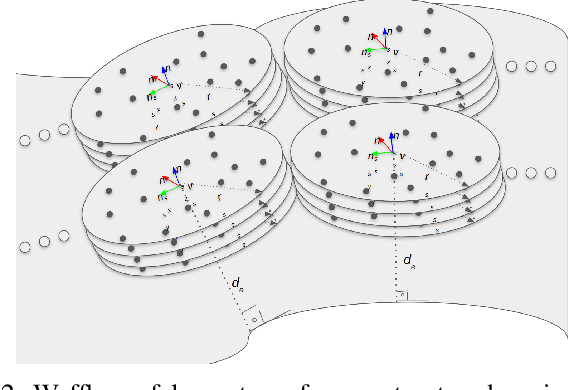

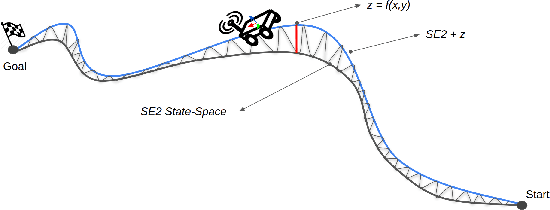
This paper introduces a new method for robot motion planning and navigation in uneven environments through a surfel representation of underlying point clouds. The proposed method addresses the shortcomings of state-of-the-art navigation methods by incorporating both kinematic and physical constraints of a robot with standard motion planning algorithms (e.g., those from the Open Motion Planning Library), thus enabling efficient sampling-based planners for challenging uneven terrain navigation on raw point cloud maps. Unlike techniques based on Digital Elevation Maps (DEMs), our novel surfel-based state-space formulation and implementation are based on raw point cloud maps, allowing for the modeling of overlapping surfaces such as bridges, piers, and tunnels. Experimental results demonstrate the robustness of the proposed method for robot navigation in real and simulated unstructured environments. The proposed approach also optimizes planners' performances by boosting their success rates up to 5x for challenging unstructured terrain planning and navigation, thanks to our surfel-based approach's robot constraint-aware sampling strategy. Finally, we provide an open-source implementation of the proposed method to benefit the robotics community.
Evaluation of Sampling-Based Optimizing Planners for Outdoor Robot Navigation
Mar 25, 2021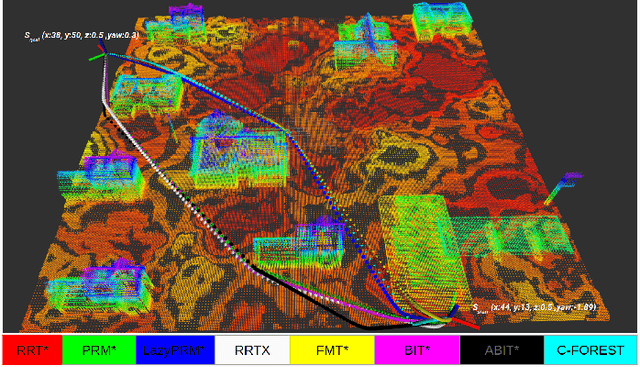
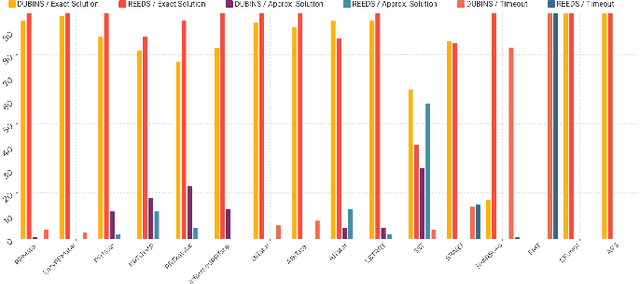
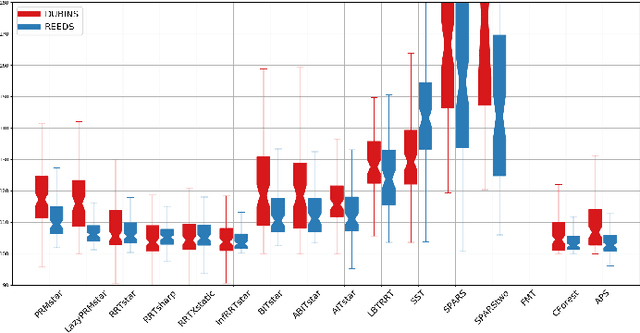
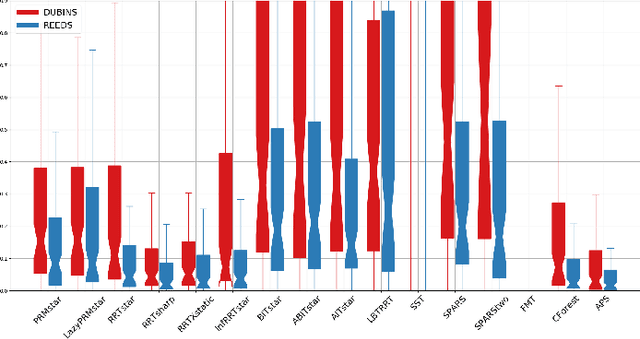
Sampling-Based Optimal(SBO) path planning has been mainly used for robotic arm manipulation tasks. Several research works have been carried out in order to evaluate performances of various SBO planners for arm manipulation. However, not much of work is available that highlights performances of SBO planners in context of mobile robot navigation in outdoor 3D environments. This paper evaluates performances of major SBO planners in Open Motion Planning Library(OMPL) for that purpose. Due to large number of existing SBO planners, experimenting and selecting a proper planner for a planning problem can be burdensome and ambiguous. SBO planner's probabilistic nature can also add a bias to this procedure. To address this, we evaluate performances of all available SBO planners in OMPL with a randomized planning problem generation method iteratively. Evaluations are done in various state spaces suiting for different differential constraints of mobile robots. The planning setups are focused for navigation of mobile robots in outdoor environments. The outdoor environment representation is done with prebuilt OctoMaps, collision checks are performed between a 3D box representing robot body and OctoMap for validation of sampled states. Several evaluation metrics such as resulting path's length, smoothness and status of acquired final solutions are selected. According to selected metrics, performances from different SBO planners are presented comparatively. Experimental results shows the significance of parallel computing towards quicker convergence rates for optimal solutions. Several SBO methods that takes advantage of parallel computing produced better results consistently in all state spaces for different planning inquiries.