 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRelevance-driven Input Dropout: an Explanation-guided Regularization Technique
May 27, 2025Overfitting is a well-known issue extending even to state-of-the-art (SOTA) Machine Learning (ML) models, resulting in reduced generalization, and a significant train-test performance gap. Mitigation measures include a combination of dropout, data augmentation, weight decay, and other regularization techniques. Among the various data augmentation strategies, occlusion is a prominent technique that typically focuses on randomly masking regions of the input during training. Most of the existing literature emphasizes randomness in selecting and modifying the input features instead of regions that strongly influence model decisions. We propose Relevance-driven Input Dropout (RelDrop), a novel data augmentation method which selectively occludes the most relevant regions of the input, nudging the model to use other important features in the prediction process, thus improving model generalization through informed regularization. We further conduct qualitative and quantitative analyses to study how Relevance-driven Input Dropout (RelDrop) affects model decision-making. Through a series of experiments on benchmark datasets, we demonstrate that our approach improves robustness towards occlusion, results in models utilizing more features within the region of interest, and boosts inference time generalization performance. Our code is available at https://github.com/Shreyas-Gururaj/LRP_Relevance_Dropout.
Optimal Camera Placement to measure Distances Conservativly Regarding Static and Dynamic Obstacles
May 17, 2011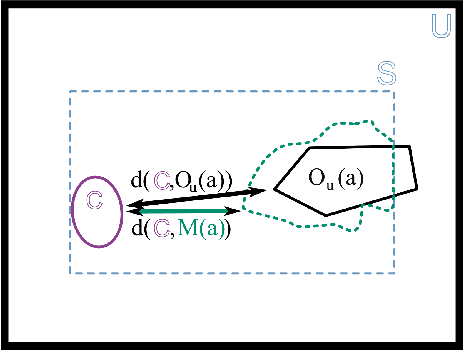
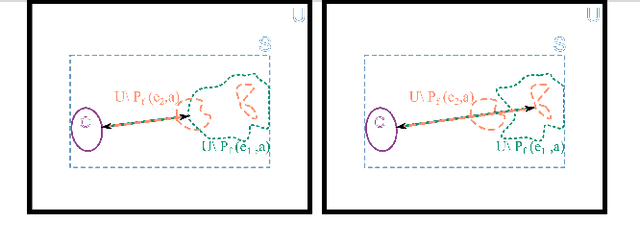
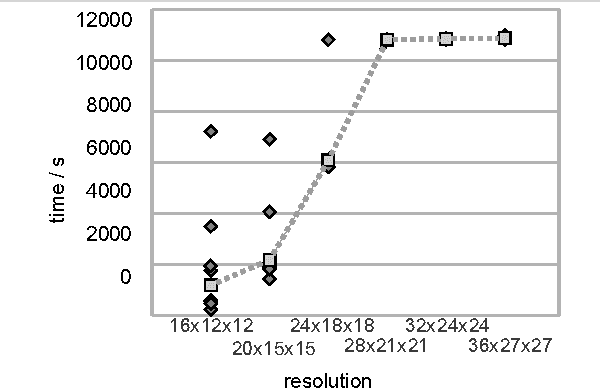
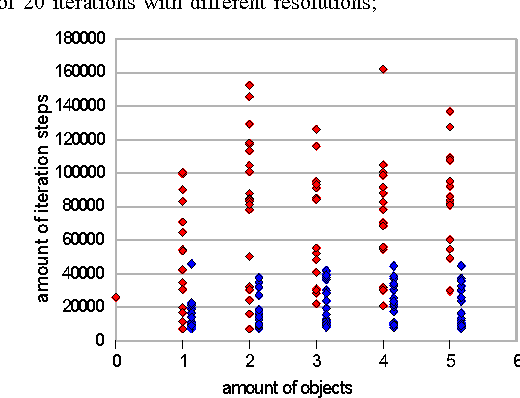
In modern production facilities industrial robots and humans are supposed to interact sharing a common working area. In order to avoid collisions, the distances between objects need to be measured conservatively which can be done by a camera network. To estimate the acquired distance, unmodelled objects, e.g., an interacting human, need to be modelled and distinguished from premodelled objects like workbenches or robots by image processing such as the background subtraction method. The quality of such an approach massively depends on the settings of the camera network, that is the positions and orientations of the individual cameras. Of particular interest in this context is the minimization of the error of the distance using the objects modelled by the background subtraction method instead of the real objects. Here, we show how this minimization can be formulated as an abstract optimization problem. Moreover, we state various aspects on the implementation as well as reasons for the selection of a suitable optimization method, analyze the complexity of the proposed method and present a basic version used for extensive experiments.