 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIdentification of Orchid Species Using Content-Based Flower Image Retrieval
Jun 10, 2014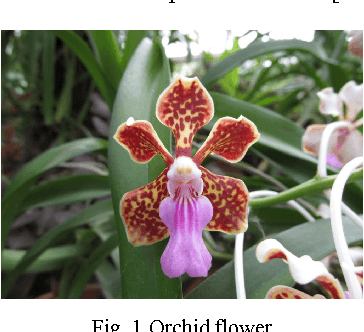
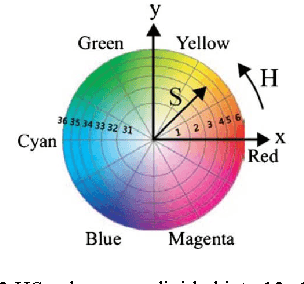
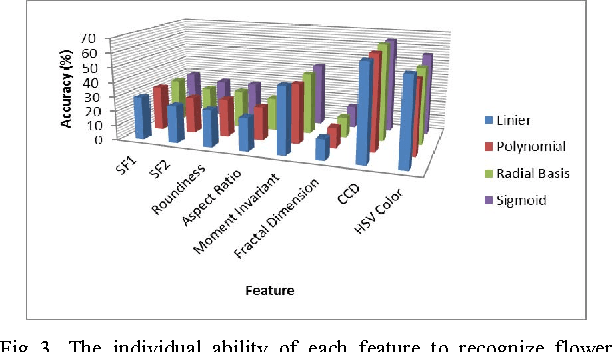
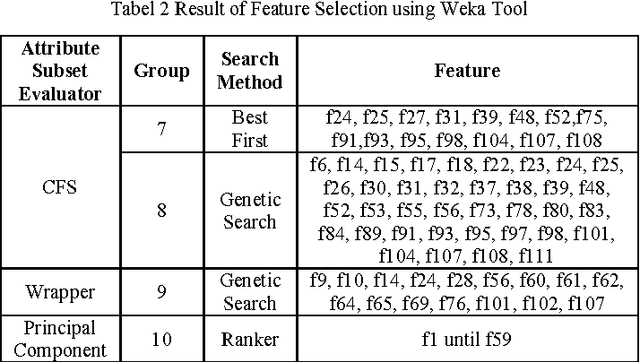
In this paper, we developed the system for recognizing the orchid species by using the images of flower. We used MSRM (Maximal Similarity based on Region Merging) method for segmenting the flower object from the background and extracting the shape feature such as the distance from the edge to the centroid point of the flower, aspect ratio, roundness, moment invariant, fractal dimension and also extract color feature. We used HSV color feature with ignoring the V value. To retrieve the image, we used Support Vector Machine (SVM) method. Orchid is a unique flower. It has a part of flower called lip (labellum) that distinguishes it from other flowers even from other types of orchids. Thus, in this paper, we proposed to do feature extraction not only on flower region but also on lip (labellum) region. The result shows that our proposed method can increase the accuracy value of content based flower image retrieval for orchid species up to $\pm$ 14%. The most dominant feature is Centroid Contour Distance, Moment Invariant and HSV Color. The system accuracy is 85,33% in validation phase and 79,33% in testing phase.
Exhaustive Search-based Model for Hybrid Sensor Network
Sep 30, 2012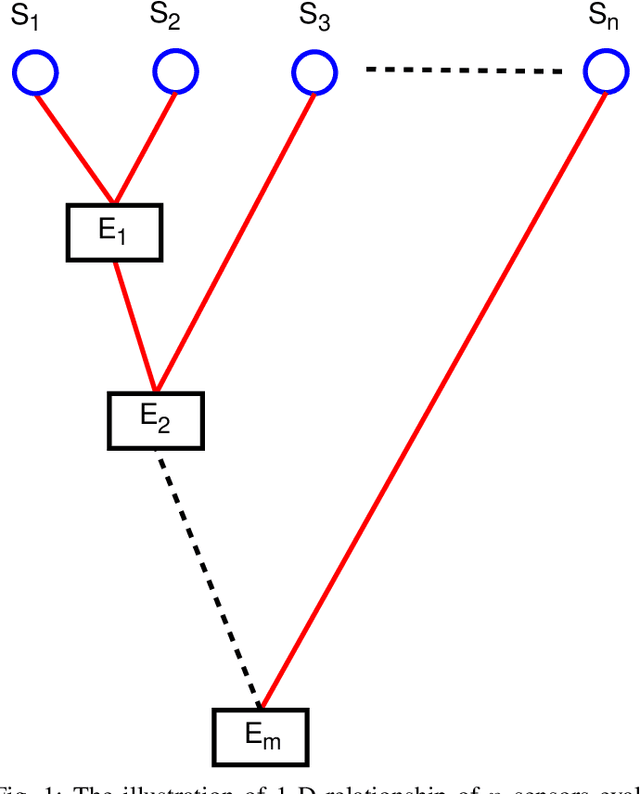
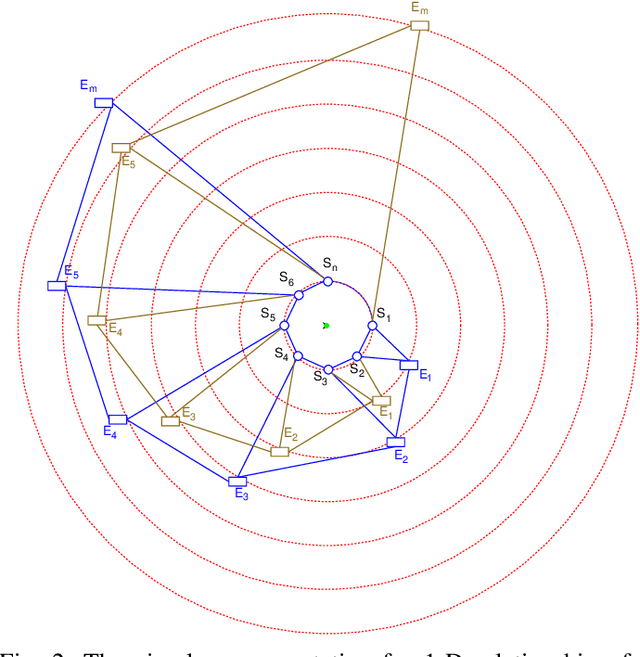
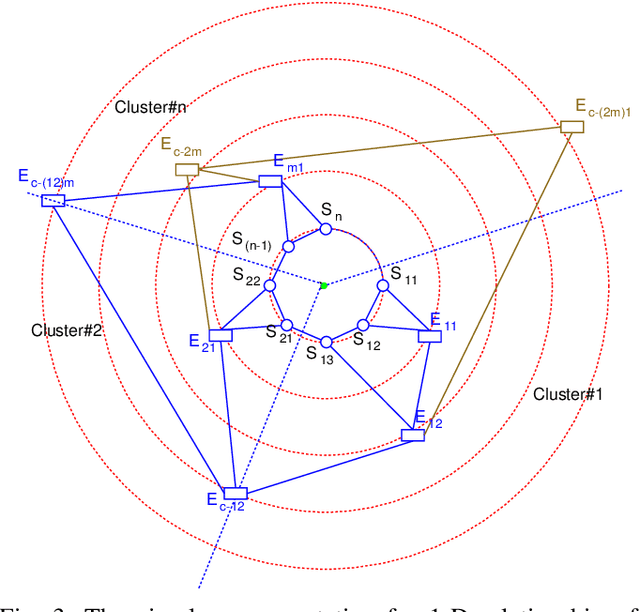
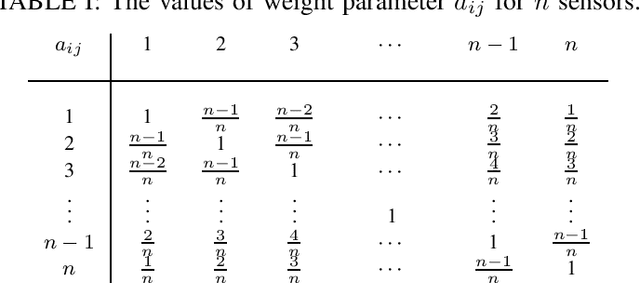
A new model for a cluster of hybrid sensors network with multi sub-clusters is proposed. The model is in particular relevant to the early warning system in a large scale monitoring system in, for example, a nuclear power plant. It mainly addresses to a safety critical system which requires real-time processes with high accuracy. The mathematical model is based on the extended conventional search algorithm with certain interactions among the nearest neighborhood of sensors. It is argued that the model could realize a highly accurate decision support system with less number of parameters. A case of one dimensional interaction function is discussed, and a simple algorithm for the model is also given.
An Integrated Software-based Solution for Modular and Self-independent Networked Robot
Nov 29, 2008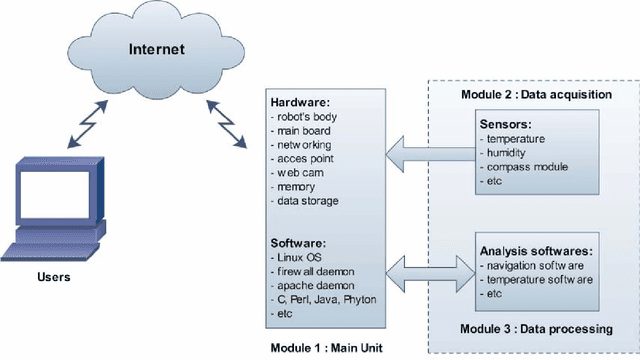
An integrated software-based solution for a modular and self-independent networked robot is introduced. The wirelessly operatable robot has been developed mainly for autonomous monitoring works with full control over web. The integrated software solution covers three components : a) the digital signal processing unit for data retrieval and monitoring system; b) the externally executable codes for control system; and c) the web programming for interfacing the end-users with the robot. It is argued that this integrated software-based approach is crucial to realize a flexible, modular and low development cost mobile monitoring apparatus.
Microcontroller-based System for Modular Networked Robot
Sep 04, 2008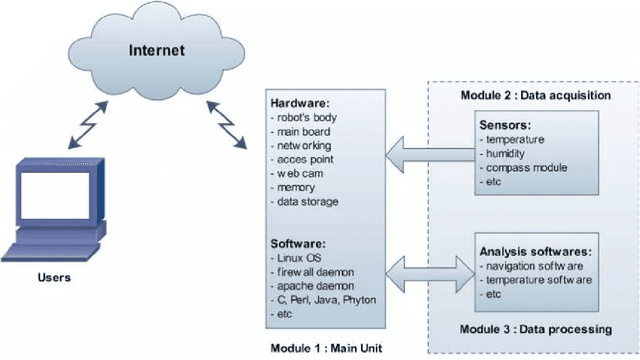
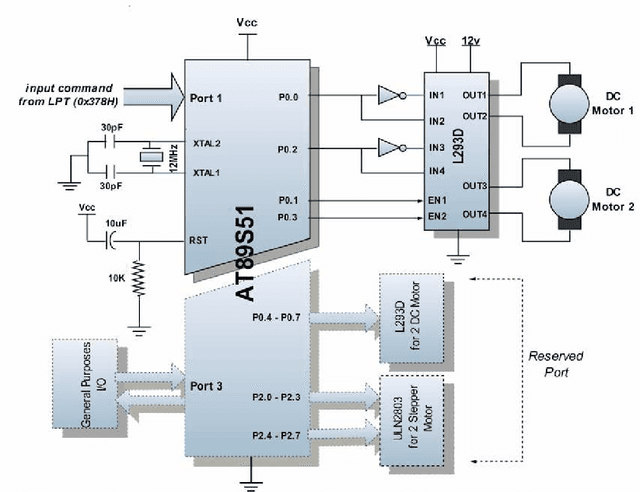
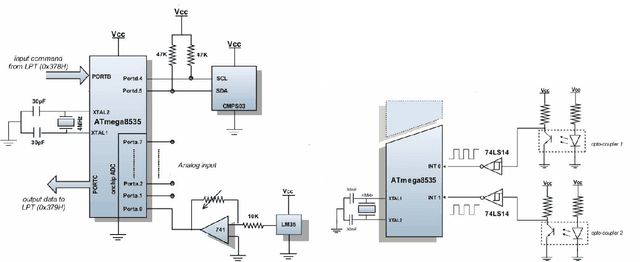
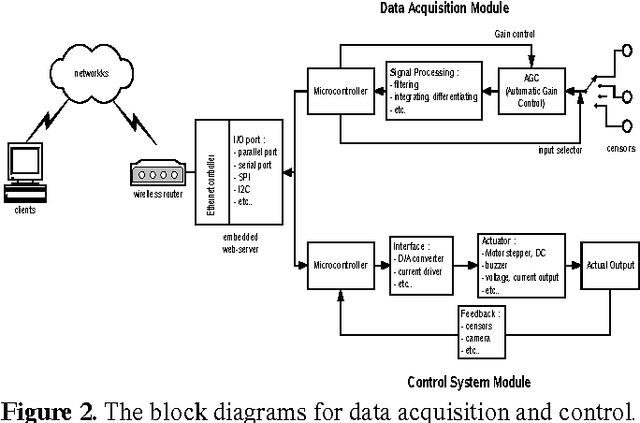
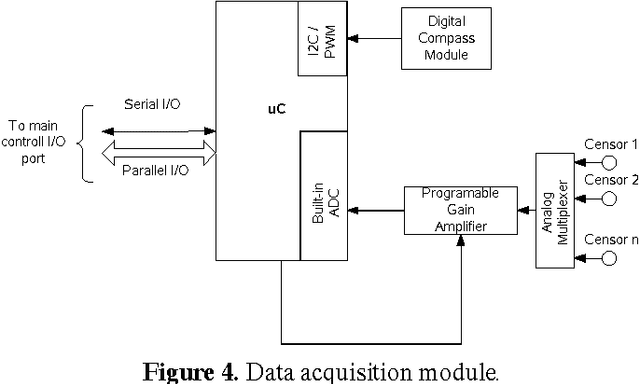
A prototype of modular networked robot for autonomous monitoring works with full control over web through wireless connection has been developed. The robot is equipped with a particular set of built-in analyzing tools and appropriate censors, depending on its main purposes, to enable self-independent and real-time data acquisition and processing. The paper is focused on the microcontroller-based system to realize the modularity. The whole system is divided into three modules : main unit, data acquisition and data processing, while the analyzed results and all aspects of control and monitoring systems are fully accessible over an integrated web-interface. This concept leads to some unique features : enhancing flexibility due to enabling partial replacement of the modules according to user needs, easy access over web for remote users, and low development and maintenance cost due to software dominated components.
Control and Monitoring System for Modular Wireless Robot
Oct 03, 2007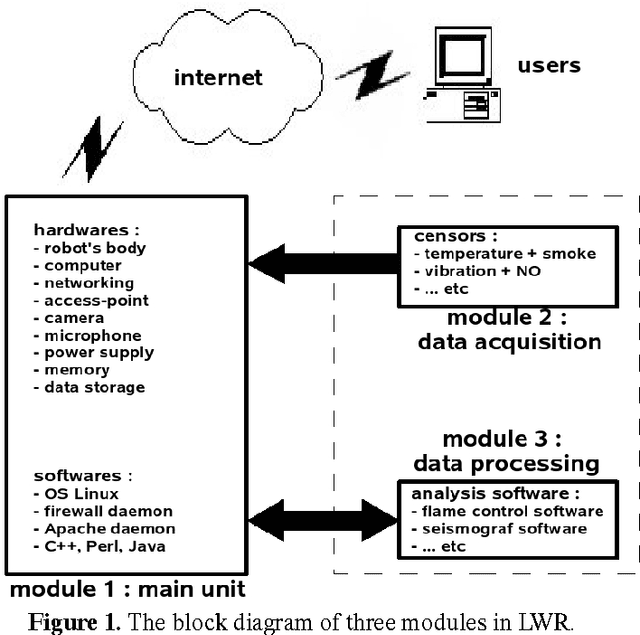
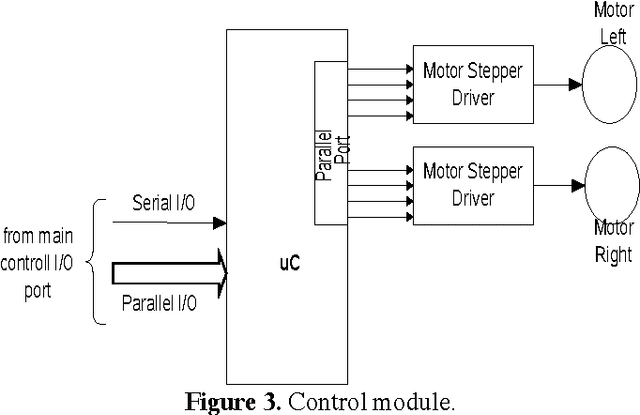
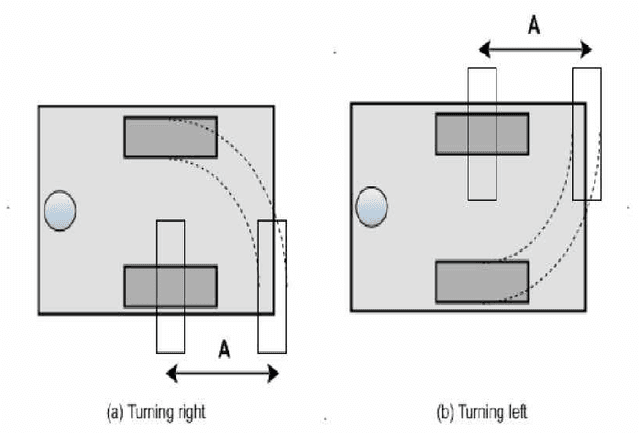
We introduce our concept on the modular wireless robot consisting of three main modules : main unit, data acquisition and data processing modules. We have developed a generic prototype with an integrated control and monitoring system to enhance its flexibility, and to enable simple operation through a web-based interface accessible wirelessly. In present paper, we focus on the microcontroller based hardware to enable data acquisition and remote mechanical control.
Real-time control and monitoring system for LIPI's Public Cluster
Aug 04, 2007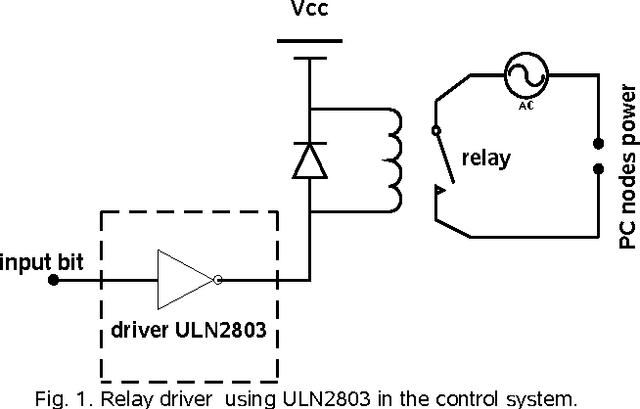
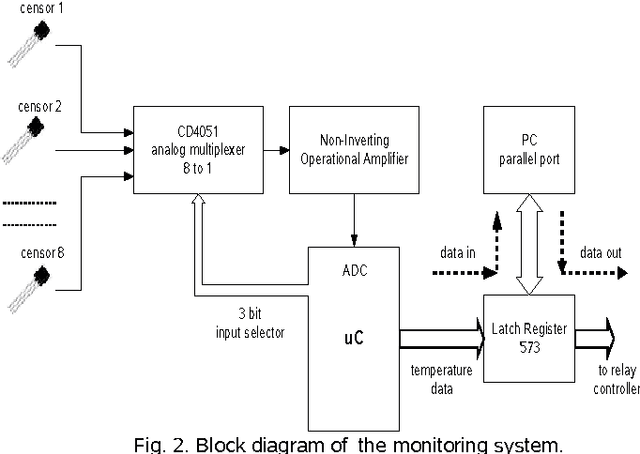
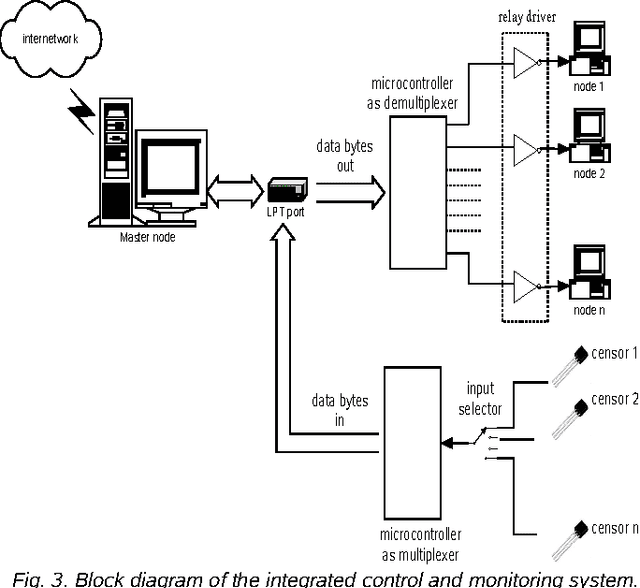
We have developed a monitoring and control system for LIPI's Public Cluster. The system consists of microcontrollers and full web-based user interfaces for daily operation. It is argued that, due to its special natures, the cluster requires fully dedicated and self developed control and monitoring system. We discuss the implementation of using parallel port and dedicated micro-controller for this purpose. We also show that integrating such systems enables an autonomous control system based on the real time monitoring, for instance an autonomous power supply control based on the actual temperature, etc.