 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploiting Euclidean Distance Field Properties for Fast and Safe 3D planning with a modified Lazy Theta*
May 29, 2025Graph search planners have been widely used for 3D path planning in the literature, and Euclidean Distance Fields (EDFs) are increasingly being used as a representation of the environment. However, to the best of our knowledge, the integration of EDFs into heuristic planning has been carried out in a loosely coupled fashion, dismissing EDF properties that can be used to accelerate/improve the planning process and enhance the safety margins of the resultant trajectories. This paper presents a fast graph search planner based on a modified Lazy Theta* planning algorithm for aerial robots in challenging 3D environments that exploits the EDF properties. The proposed planner outperforms classic graph search planners in terms of path smoothness and safety. It integrates EDFs as environment representation and directly generates fast and smooth paths avoiding the use of post-processing methods; it also considers the analytical properties of EDFs to obtain an approximation of the EDF cost along the line-of-sight segments and to reduce the number of visibility neighbours, which directly impacts the computation time. Moreover, we demonstrate that the proposed EDF-based cost function satisfies the triangle inequality, which reduces calculations during exploration and, hence, computation time. Many experiments and comparatives are carried out in 3D challenging indoor and outdoor simulation environments to evaluate and validate the proposed planner. The results show an efficient and safe planner in these environments.
D-LIO: 6DoF Direct LiDAR-Inertial Odometry based on Simultaneous Truncated Distance Field Mapping
May 22, 2025This paper presents a new approach for 6DoF Direct LiDAR-Inertial Odometry (D-LIO) based on the simultaneous mapping of truncated distance fields on CPU. Such continuous representation (in the vicinity of the points) enables working with raw 3D LiDAR data online, avoiding the need of LiDAR feature selection and tracking, simplifying the odometry pipeline and easily generalizing to many scenarios. The method is based on the proposed Fast Truncated Distance Field (Fast-TDF) method as a convenient tool to represent the environment. Such representation enables i) solving the LiDAR point-cloud registration as a nonlinear optimization process without the need of selecting/tracking LiDAR features in the input data, ii) simultaneously producing an accurate truncated distance field map of the environment, and iii) updating such map at constant time independently of its size. The approach is tested using open datasets, aerial and ground. It is also benchmarked against other state-of-the-art odometry approaches, demonstrating the same or better level of accuracy with the added value of an online-generated TDF representation of the environment, that can be used for other robotics tasks as planning or collision avoidance. The source code is publicly available at https://anonymous.4open.science/r/D-LIO
Efficient variable-length hanging tether parameterization for marsupial robot planning in 3D environments
Feb 06, 2025



This paper presents a novel approach to efficiently parameterize and estimate the state of a hanging tether for path and trajectory planning of a UGV tied to a UAV in a marsupial configuration. Most implementations in the state of the art assume a taut tether or make use of the catenary curve to model the shape of the hanging tether. The catenary model is complex to compute and must be instantiated thousands of times during the planning process, becoming a time-consuming task, while the taut tether assumption simplifies the problem, but might overly restrict the movement of the platforms. In order to accelerate the planning process, this paper proposes defining an analytical model to efficiently compute the hanging tether state, and a method to get a tether state parameterization free of collisions. We exploit the existing similarity between the catenary and parabola curves to derive analytical expressions of the tether state.
Path and trajectory planning of a tethered UAV-UGV marsupial robotic system
May 11, 2023



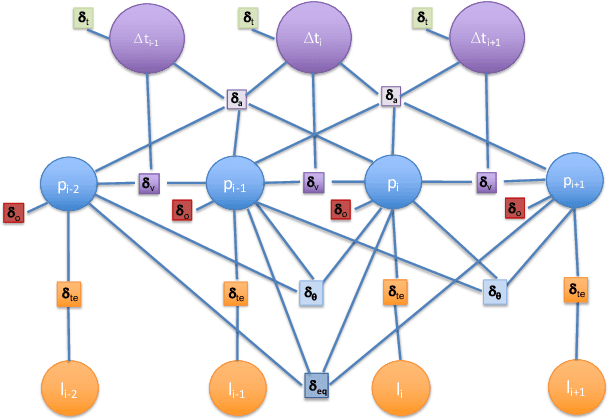
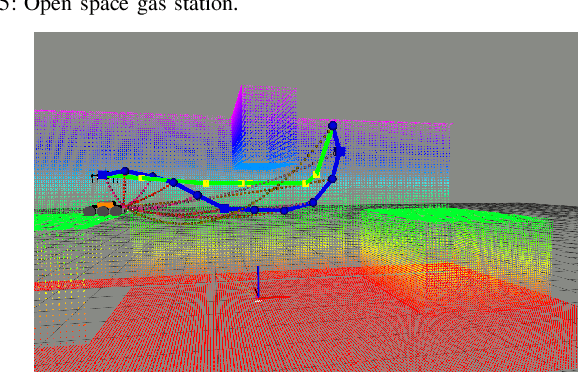
This letter addresses the problem of trajectory planning in a marsupial robotic system consisting of an unmanned aerial vehicle (UAV) linked to an unmanned ground vehicle (UGV) through a non-taut tether withcontrollable length. To the best of our knowledge, this is the first method that addresses the trajectory planning of a marsupial UGV-UAV with a non-taut tether. The objective is to determine a synchronized collision-free trajectory for the three marsupial system agents: UAV, UGV, and tether. First, we present a path planning solution based on optimal Rapidly-exploring Random Trees (RRT*) with novel sampling and steering techniques to speed-up the computation. This algorithm is able to obtain collision-free paths for the UAV and the UGV, taking into account the 3D environment and the tether. Then, the paper presents a trajectory planner based on non-linear least squares. The optimizer takes into account aspects not considered in the path planning, like temporal constraints of the motion imposed by limits on the velocities and accelerations of the robots , or raising the tether's clearance. Simulated and field test results demonstrate that the approach generates obstacle-free, smooth, and feasible trajectories for the marsupial system.
Path and trajectory planning of a tethered UAV-UGV marsupial robotics system
Apr 04, 2022



This paper addresses the problem of trajectory planning in a marsupial robotic system consisting of an unmanned aerial vehicle (UAV) linked to an unmanned ground vehicle (UGV) through a non-taut tether that has a controllable length. The objective is to determine a synchronized collision-free trajectory for the three marsupial system agents: UAV, UGV, and tether. First, we present a path planning solution based on optimal Rapidly exploring Random Trees (RRT*) that takes into account constraints related to the positions of UAV, UGV, tether and the 3D environment. The specialization of the main RRT* methods allows us to obtain feasible solutions in short times. Then, the paper presents a trajectory planner based on non-linear least squares. The optimizer takes into account aspects not considered in the path planning, like temporal constraints of the motion that impose limits on the velocities and accelerations of the robots. Results from simulated scenarios demonstrate that the approach is able to generate obstacle-free and smooth trajectories for the UAV, UGV, and tether.
Optimization-based Trajectory Planning for Tethered Marsupial Robots
Nov 06, 2020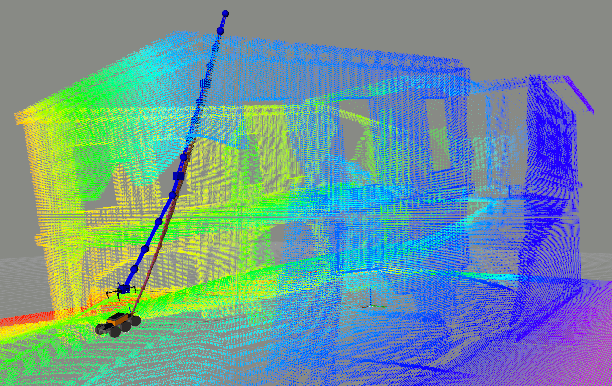

This paper presents a non-linear optimization method for trajectory planning in a marsupial robot configuration. Particularly, the paper addresses the planning problem of an unmanned aerial vehicle (UAV) linked to an unmanned ground vehicle (UGV) by means of a tether. The result is a collision-free trajectory for UAV and tether, assuming the UGV position is static. The optimizer takes into account constraints related to the UAV, UGV and tether positions, obstacles and temporal aspects of the motion such as limited robot velocities and accelerations, and finally the tether state, which is not required to be tense. The problem is formulated in a weighted multi-objective optimization framework. Results from simulated scenarios demonstrate that the approach is able to generate obstacle free and smooth trajectories for the UAV and tether from the marsupial system.