 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTendon-Based Proprioception in an Anthropomorphic Underactuated Robotic Hand with Series Elastic Actuators
Sep 16, 2025



Anthropomorphic underactuated hands are widely employed for their versatility and structural simplicity. In such systems, compact sensing integration and proper interpretation aligned with underactuation are crucial for realizing practical grasp functionalities. This study proposes an anthropomorphic underactuated hand that achieves comprehensive situational awareness of hand-object interaction, utilizing tendon-based proprioception provided by series elastic actuators (SEAs). We developed a compact SEA with high accuracy and reliability that can be seamlessly integrated into sensorless fingers. By coupling proprioceptive sensing with potential energy-based modeling, the system estimates key grasp-related variables, including contact timing, joint angles, relative object stiffness, and finger configuration changes indicating external disturbances. These estimated variables enable grasp posture reconstruction, safe handling of deformable objects, and blind grasping with proprioceptive-only recognition of objects with varying geometry and stiffness. Finger-level experiments and hand-level demonstrations confirmed the effectiveness of the proposed approach. The results demonstrate that tendon-based proprioception serves as a compact and robust sensing modality for practical manipulation without reliance on vision or tactile feedback.
Compliant Suction Gripper with Seamless Deployment and Retraction for Robust Picking against Depth and Tilt Errors
Nov 29, 2022



Applying suction grippers in unstructured environments is a challenging task because of depth and tilt errors in vision systems, requiring additional costs in elaborate sensing and control. To reduce additional costs, suction grippers with compliant bodies or mechanisms have been proposed; however, their bulkiness and limited allowable error hinder their use in complex environments with large errors. Here, we propose a compact suction gripper that can pick objects over a wide range of distances and tilt angles without elaborate sensing and control. The spring-inserted gripper body deploys and conforms to distant and tilted objects until the suction cup completely seals with the object and retracts immediately after, while holding the object. This seamless deployment and retraction is enabled by connecting the gripper body and suction cup to the same vacuum source, which couples the vacuum picking and retraction of the gripper body. Experimental results validated that the proposed gripper can pick objects within 79 mm, which is 1.4 times the initial length, and can pick objects with tilt angles up to 60{\deg}. The feasibility of the gripper was verified by demonstrations, including picking objects of different heights from the same picking height and the bin picking of transparent objects.
Origami-based Zygote structure enables pluripotent shape-transforming deployable structure
Aug 08, 2022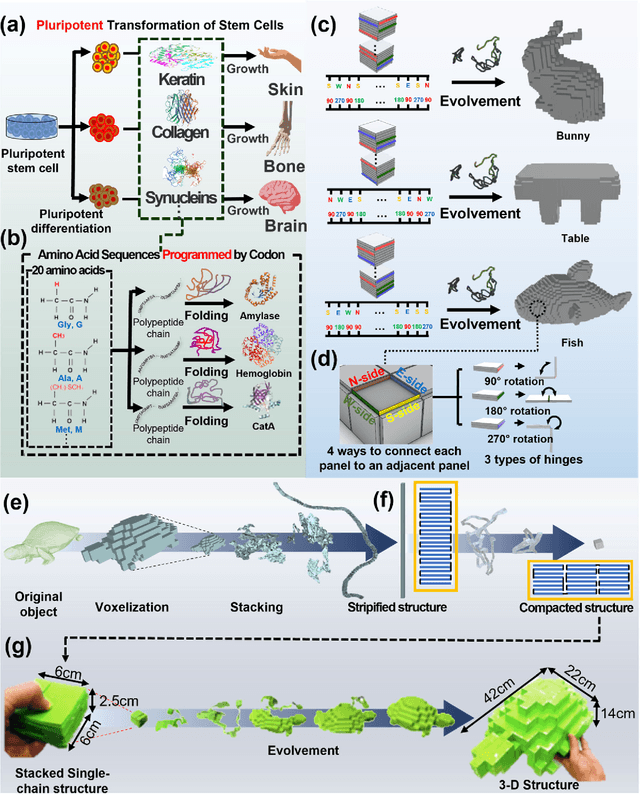
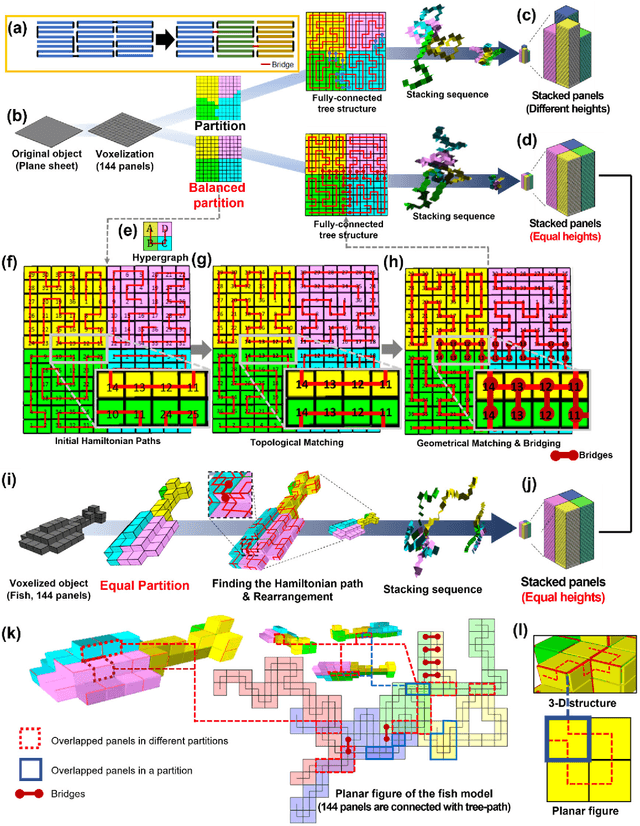
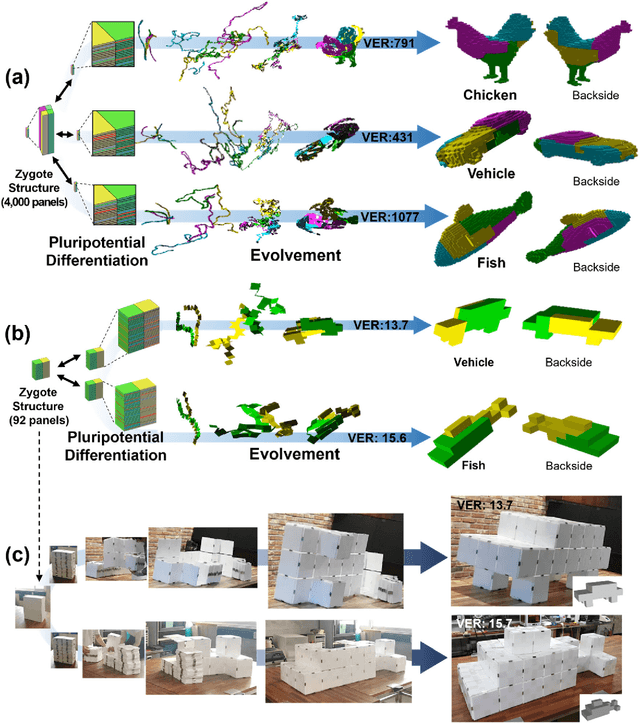
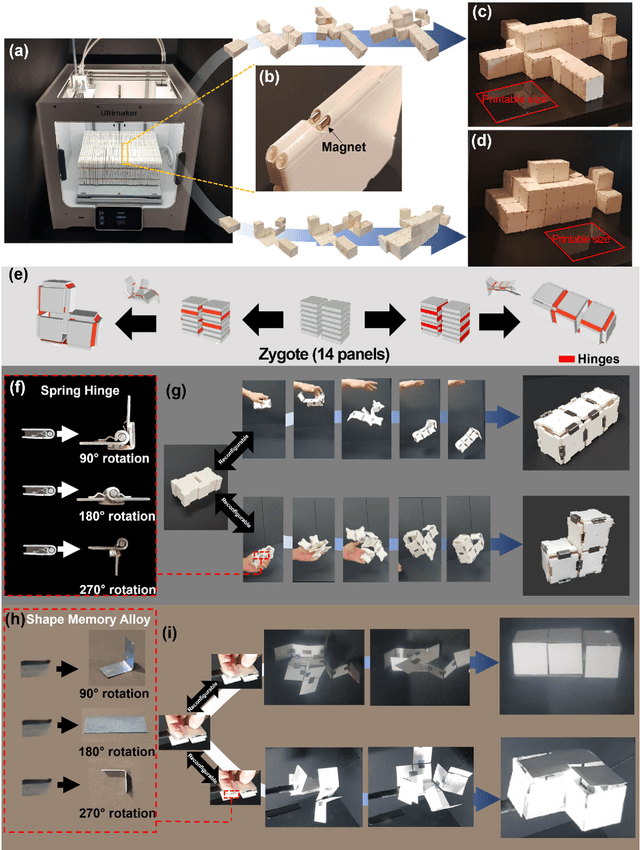
We propose an algorithmic framework of a pluripotent structure evolving from a simple compact structure into diverse complex 3-D structures for designing the shape transformable, reconfigurable, and deployable structures and robots. Our algorithmic approach suggests a way of transforming a compact structure consisting of uniform building blocks into a large, desired 3-D shape. Analogous to the pluripotent stem cells that can grow into a preprogrammed shape according to coded information, which we call DNA, compactly stacked panels named the zygote structure can evolve into arbitrary 3-D structures by programming their connection path. Our stacking algorithm obtains this coded sequence by inversely stacking the voxelized surface of the desired structure into a tree. Applying the connection path obtained by the stacking algorithm, the compactly stacked panels named the zygote structure can be deployed into diverse large 3-D structures. We conceptually demonstrated our pluripotent evolving structure by energy releasing commercial spring hinges and thermally actuated shape memory alloy (SMA) hinges, respectively. We also show that the proposed concept enables the fabrication of large structures in a significantly smaller workspace.