 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDomain Adaptation for Different Sensor Configurations in 3D Object Detection
Sep 04, 2025Recent advances in autonomous driving have underscored the importance of accurate 3D object detection, with LiDAR playing a central role due to its robustness under diverse visibility conditions. However, different vehicle platforms often deploy distinct sensor configurations, causing performance degradation when models trained on one configuration are applied to another because of shifts in the point cloud distribution. Prior work on multi-dataset training and domain adaptation for 3D object detection has largely addressed environmental domain gaps and density variation within a single LiDAR; in contrast, the domain gap for different sensor configurations remains largely unexplored. In this work, we address domain adaptation across different sensor configurations in 3D object detection. We propose two techniques: Downstream Fine-tuning (dataset-specific fine-tuning after multi-dataset training) and Partial Layer Fine-tuning (updating only a subset of layers to improve cross-configuration generalization). Using paired datasets collected in the same geographic region with multiple sensor configurations, we show that joint training with Downstream Fine-tuning and Partial Layer Fine-tuning consistently outperforms naive joint training for each configuration. Our findings provide a practical and scalable solution for adapting 3D object detection models to the diverse vehicle platforms.
Towards learning-based planning:The nuPlan benchmark for real-world autonomous driving
Mar 07, 2024



Machine Learning (ML) has replaced traditional handcrafted methods for perception and prediction in autonomous vehicles. Yet for the equally important planning task, the adoption of ML-based techniques is slow. We present nuPlan, the world's first real-world autonomous driving dataset, and benchmark. The benchmark is designed to test the ability of ML-based planners to handle diverse driving situations and to make safe and efficient decisions. To that end, we introduce a new large-scale dataset that consists of 1282 hours of diverse driving scenarios from 4 cities (Las Vegas, Boston, Pittsburgh, and Singapore) and includes high-quality auto-labeled object tracks and traffic light data. We exhaustively mine and taxonomize common and rare driving scenarios which are used during evaluation to get fine-grained insights into the performance and characteristics of a planner. Beyond the dataset, we provide a simulation and evaluation framework that enables a planner's actions to be simulated in closed-loop to account for interactions with other traffic participants. We present a detailed analysis of numerous baselines and investigate gaps between ML-based and traditional methods. Find the nuPlan dataset and code at nuplan.org.
NuPlan: A closed-loop ML-based planning benchmark for autonomous vehicles
Jul 12, 2021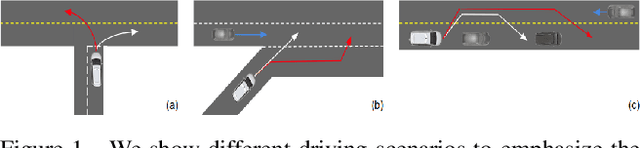
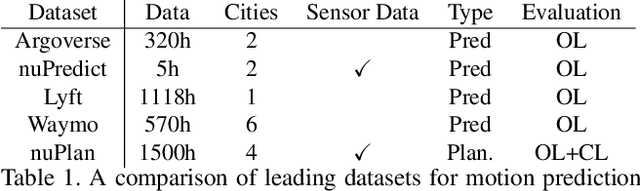
In this work, we propose the world's first closed-loop ML-based planning benchmark for autonomous driving. While there is a growing body of ML-based motion planners, the lack of established datasets and metrics has limited the progress in this area. Existing benchmarks for autonomous vehicle motion prediction have focused on short-term motion forecasting, rather than long-term planning. This has led previous works to use open-loop evaluation with L2-based metrics, which are not suitable for fairly evaluating long-term planning. Our benchmark overcomes these limitations by introducing a large-scale driving dataset, lightweight closed-loop simulator, and motion-planning-specific metrics. We provide a high-quality dataset with 1500h of human driving data from 4 cities across the US and Asia with widely varying traffic patterns (Boston, Pittsburgh, Las Vegas and Singapore). We will provide a closed-loop simulation framework with reactive agents and provide a large set of both general and scenario-specific planning metrics. We plan to release the dataset at NeurIPS 2021 and organize benchmark challenges starting in early 2022.