 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDurLAR: A High-fidelity 128-channel LiDAR Dataset with Panoramic Ambient and Reflectivity Imagery for Multi-modal Autonomous Driving Applications
Jun 14, 2024



We present DurLAR, a high-fidelity 128-channel 3D LiDAR dataset with panoramic ambient (near infrared) and reflectivity imagery, as well as a sample benchmark task using depth estimation for autonomous driving applications. Our driving platform is equipped with a high resolution 128 channel LiDAR, a 2MPix stereo camera, a lux meter and a GNSS/INS system. Ambient and reflectivity images are made available along with the LiDAR point clouds to facilitate multi-modal use of concurrent ambient and reflectivity scene information. Leveraging DurLAR, with a resolution exceeding that of prior benchmarks, we consider the task of monocular depth estimation and use this increased availability of higher resolution, yet sparse ground truth scene depth information to propose a novel joint supervised/self-supervised loss formulation. We compare performance over both our new DurLAR dataset, the established KITTI benchmark and the Cityscapes dataset. Our evaluation shows our joint use supervised and self-supervised loss terms, enabled via the superior ground truth resolution and availability within DurLAR improves the quantitative and qualitative performance of leading contemporary monocular depth estimation approaches (RMSE=3.639, Sq Rel=0.936).
* Accepted by 3DV 2021; 13 pages, 14 figures; Dataset at https://github.com/l1997i/durlar
An Approach for Adaptive Automatic Threat Recognition Within 3D Computed Tomography Images for Baggage Security Screening
Mar 25, 2019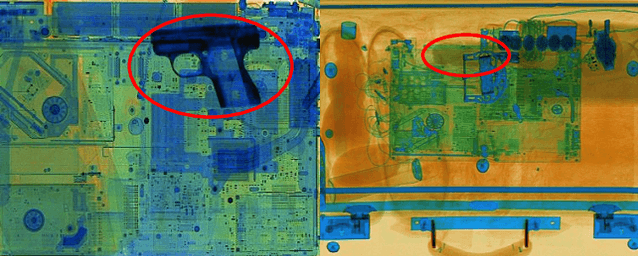
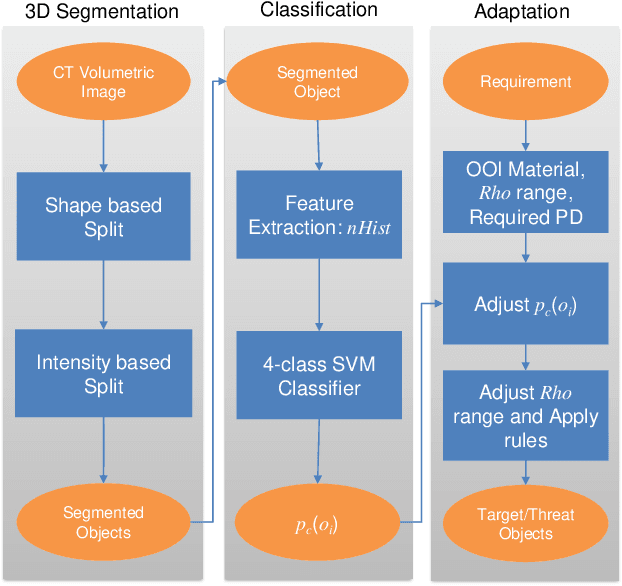
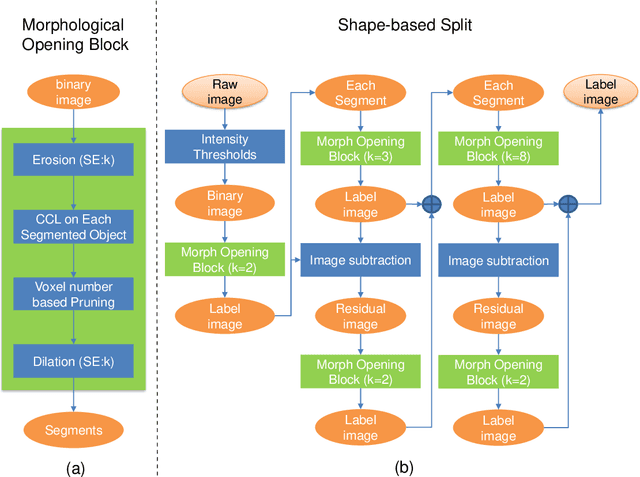
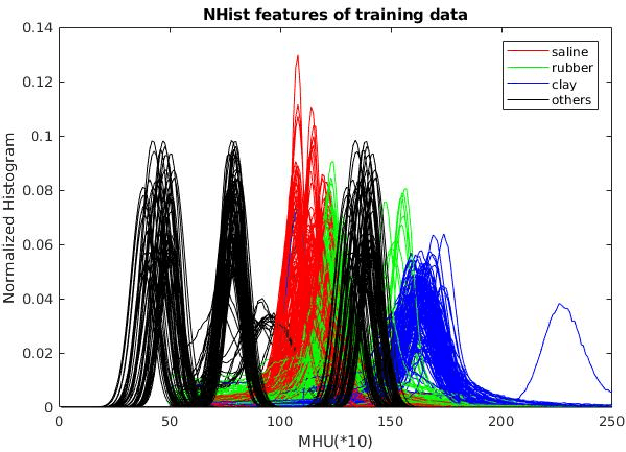
The screening of baggage using X-ray scanners is now routine in aviation security with automatic threat detection approaches, based on 3D X-ray computed tomography (CT) images, known as Automatic Threat Recognition (ATR) within the aviation security industry. These current strategies use pre-defined threat material signatures in contrast to adaptability towards new and emerging threat signatures. To address issue, the concept of adaptive automatic threat recognition (AATR) was proposed in previous work by \cite{to7}. In this paper, we present a solution to AATR based on such X-ray CT baggage scan imagery. This aims to address the issues of rapidly evolving threat signatures within the screening requirements. Ideally, the detection algorithms deployed within the security scanners should be readily adaptable to different situations with varying requirements of threat characteristics (e.g., threat material, physical properties of objects). We tackle this issue using a novel adaptive machine learning methodology with our solution consisting of a multi-scale 3D CT image segmentation algorithm, a multi-class support vector machine (SVM) classifier for object material recognition and a strategy to enable the adaptability of our approach. Experiments are conducted on both open and sequestered 3D CT baggage image datasets specifically collected for the AATR study. Our proposed approach performs well on both recognition and adaptation. Overall our approach can achieve the probability of detection around 90\% with a probability of false alarm below 20\%. Our AATR shows the capabilities of adapting to varying types of materials, even the unknown materials which are not available in the training data, adapting to varying required probability of detection and adapting to varying scales of the threat object.