 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollaborative Last-Mile Delivery: A Multi-Platform Vehicle Routing Problem With En-route Charging
May 29, 2025



The rapid growth of e-commerce and the increasing demand for timely, cost-effective last-mile delivery have increased interest in collaborative logistics. This research introduces a novel collaborative synchronized multi-platform vehicle routing problem with drones and robots (VRP-DR), where a fleet of $\mathcal{M}$ trucks, $\mathcal{N}$ drones and $\mathcal{K}$ robots, cooperatively delivers parcels. Trucks serve as mobile platforms, enabling the launching, retrieving, and en-route charging of drones and robots, thereby addressing critical limitations such as restricted payload capacities, limited range, and battery constraints. The VRP-DR incorporates five realistic features: (1) multi-visit service per trip, (2) multi-trip operations, (3) flexible docking, allowing returns to the same or different trucks (4) cyclic and acyclic operations, enabling return to the same or different nodes; and (5) en-route charging, enabling drones and robots to recharge while being transported on the truck, maximizing operational efficiency by utilizing idle transit time. The VRP-DR is formulated as a mixed-integer linear program (MILP) to minimize both operational costs and makespan. To overcome the computational challenges of solving large-scale instances, a scalable heuristic algorithm, FINDER (Flexible INtegrated Delivery with Energy Recharge), is developed, to provide efficient, near-optimal solutions. Numerical experiments across various instance sizes evaluate the performance of the MILP and heuristic approaches in terms of solution quality and computation time. The results demonstrate significant time savings of the combined delivery mode over the truck-only mode and substantial cost reductions from enabling multi-visits. The study also provides insights into the effects of en-route charging, docking flexibility, drone count, speed, and payload capacity on system performance.
DClEVerNet: Deep Combinatorial Learning for Efficient EV Charging Scheduling in Large-scale Networked Facilities
May 18, 2023



With the electrification of transportation, the rising uptake of electric vehicles (EVs) might stress distribution networks significantly, leaving their performance degraded and stability jeopardized. To accommodate these new loads cost-effectively, modern power grids require coordinated or ``smart'' charging strategies capable of optimizing EV charging scheduling in a scalable and efficient fashion. With this in view, the present work focuses on reservation management programs for large-scale, networked EV charging stations. We formulate a time-coupled binary optimization problem that maximizes EV users' total welfare gain while accounting for the network's available power capacity and stations' occupancy limits. To tackle the problem at scale while retaining high solution quality, a data-driven optimization framework combining techniques from the fields of Deep Learning and Approximation Algorithms is introduced. The framework's key ingredient is a novel input-output processing scheme for neural networks that allows direct extrapolation to problem sizes substantially larger than those included in the training set. Extensive numerical simulations based on synthetic and real-world data traces verify the effectiveness and superiority of the presented approach over two representative scheduling algorithms. Lastly, we round up the contributions by listing several immediate extensions to the proposed framework and outlining the prospects for further exploration.
Autonomous Recharging and Flight Mission Planning for Battery-operated Autonomous Drones
Sep 12, 2017
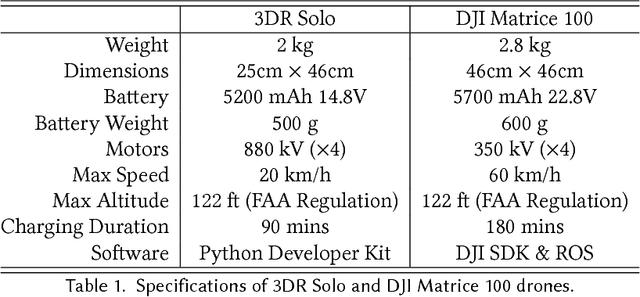
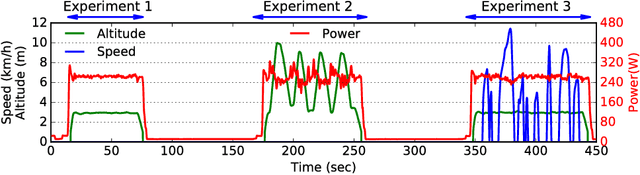
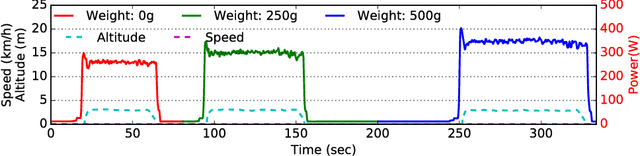
Autonomous drones (also known as unmanned aerial vehicles) are increasingly popular for diverse applications of light-weight delivery and as substitutions of manned operations in remote locations. The computing systems for drones are becoming a new venue for research in cyber-physical systems. Autonomous drones require integrated intelligent decision systems to control and manage their flight missions in the absence of human operators. One of the most crucial aspects of drone mission control and management is related to the optimization of battery lifetime. Typical drones are powered by on-board batteries, with limited capacity. But drones are expected to carry out long missions. Thus, a fully automated management system that can optimize the operations of battery-operated autonomous drones to extend their operation time is highly desirable. This paper presents several contributions to automated management systems for battery-operated drones: (1) We conduct empirical studies to model the battery performance of drones, considering various flight scenarios. (2) We study a joint problem of flight mission planning and recharging optimization for drones with an objective to complete a tour mission for a set of sites of interest in the shortest time. This problem captures diverse applications of delivery and remote operations by drones. (3) We present algorithms for solving the problem of flight mission planning and recharging optimization. We implemented our algorithms in a drone management system, which supports real-time flight path tracking and re-computation in dynamic environments. We evaluated the results of our algorithms using data from empirical studies. (4) To allow fully autonomous recharging of drones, we also develop a robotic charging system prototype that can recharge drones autonomously by our drone management system.