 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSoft Electroadhesive Feet for Micro Aerial Robots Perching on Smooth and Curved Surfaces
Apr 10, 2026Electroadhesion (EA) provides electrically switchable adhesion and is a promising mechanism for perching micro aerial robots on smooth surfaces. However, practical implementations of soft and stretchable EA pads for aerial perching remain limited. This work presents (i) an efficient workflow for fabricating soft, stretchable electroadhesive pads with sinusoidal wave and concentric-circle electrodes in multiple sizes, (ii) a controlled experimental comparison of normal and shear adhesion under inactive (0 kV) and active (4.8 kV) conditions using an Instron-based setup, and (iii) a perching demonstration using a Crazyflie quadrotor equipped with electroadhesive feet on flat and curved substrates. Experimental results show that shear adhesion dominates, reaching forces on the order of 3 N with partial pad contact, while normal adhesion is comparatively small and strongly dependent on substrate properties. The Crazyflie prototype demonstrates repeatable attachment on smooth plastic surfaces, including curved geometries, as well as rapid detachment when the voltage is removed. These results highlight the potential of soft electroadhesive feet for lightweight and reliable perching in micro aerial vehicles (MAVs).
A Soft Robotic Gripper with Active Palm for In-Hand Object Reorientation
Jul 25, 2023The human hand has an inherent ability to manipulate and re-orientate objects without external assistance. As a consequence, we are able to operate tools and perform an array of actions using just one hand, without having to continuously re-grasp objects. Emulating this functionality in robotic end-effectors remains a key area of study with efforts being made to create advanced control systems that could be used to operate complex manipulators. In this paper, a three fingered soft gripper with an active rotary palm is presented as a simpler, alternative method of performing in-hand rotations. The gripper, complete with its pneumatic suction cup to prevent object slippage, was tested and found to be able to effectively grasp and rotate a variety of objects both quickly and precisely.
The Natural Robotics Contest: Crowdsourced Biomimetic Design
Oct 20, 2022
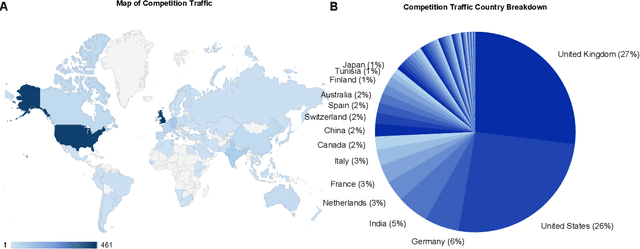
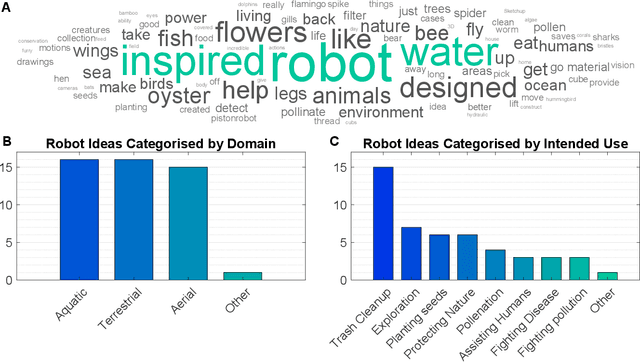
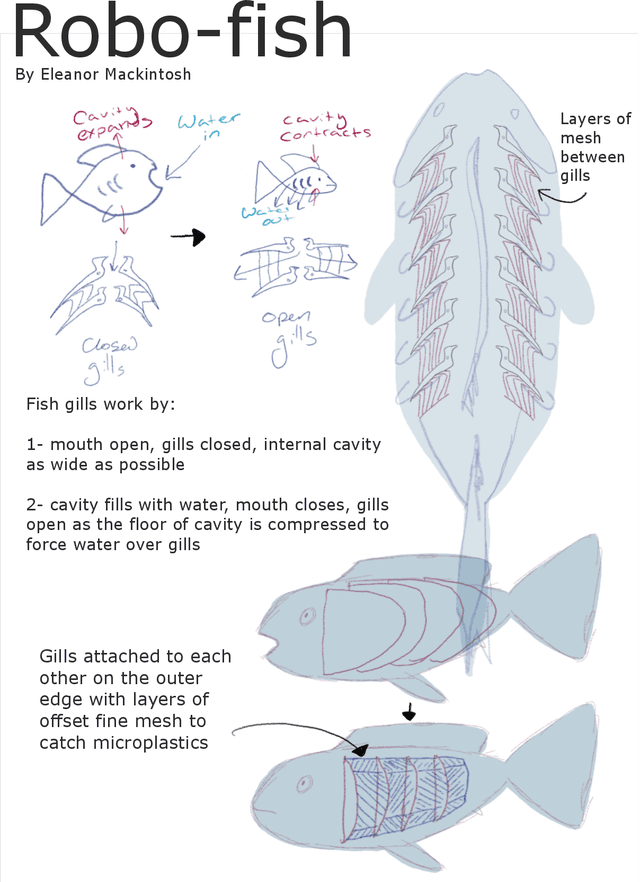
Biomimetic and Bioinspired design is not only a potent resource for roboticists looking to develop robust engineering systems or understand the natural world. It is also a uniquely accessible entry point into science and technology. Every person on Earth constantly interacts with nature, and most people have an intuitive sense of animal and plant behavior, even without realizing it. The Natural Robotics Contest is novel piece of science communication that takes advantage of this intuition, and creates an opportunity for anyone with an interest in nature or robotics to submit their idea and have it turned into a real engineering system. In this paper we will discuss the competition's submissions, which show how the public thinks of nature as well as the problems people see as most pressing for engineers to solve. We will then show our design process from the winning submitted concept sketch through to functioning robot, to offer a case study in biomimetic robot design. The winning design is a robotic fish which uses gill structures to filter out microplastics. This was fabricated into an open source robot with a novel 3D printed gill design. By presenting the competition and the winning entry we hope to foster further interest in nature-inspired design, and increase the interplay between nature and engineering in the minds of readers.