 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConcurrent Flow-Based Localization and Mapping in Time-Invariant Flow Fields
Oct 15, 2019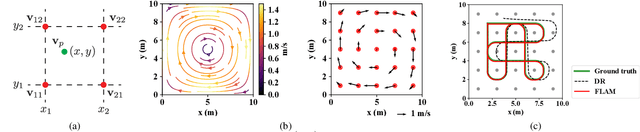
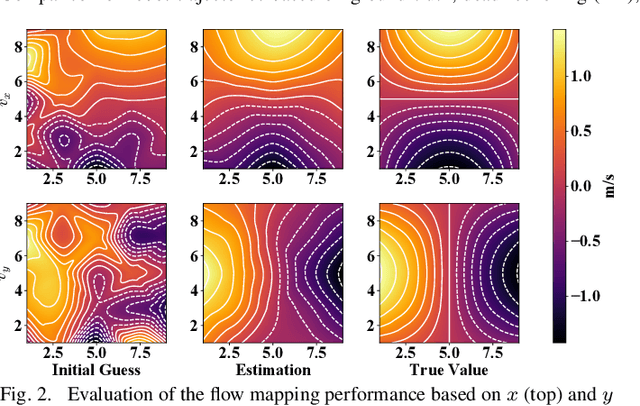
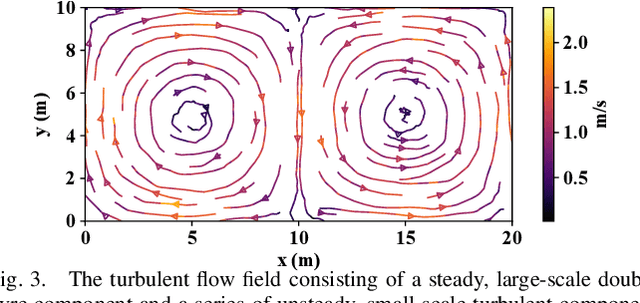
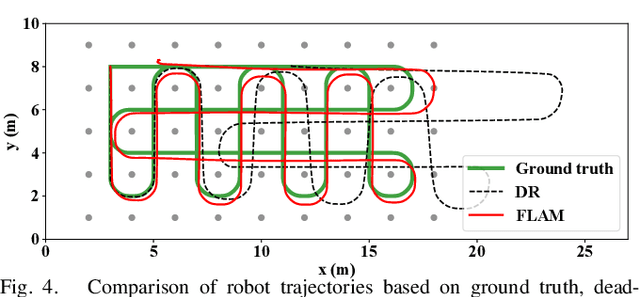
We present the concept of concurrent flow-based localization and mapping (FLAM) for autonomous field robots navigating within background flows. Different from the classical simultaneous localization and mapping (SLAM) problem, where the robot interacts with discrete features, FLAM utilizes the continuous flow fields as navigation references for mobile robots and provides flow field mapping capability with in-situ flow velocity observations. This approach is of importance to underwater vehicles in mid-depth oceans or aerial vehicles in GPS-denied atmospheric circulations. This article introduces the formulation of FLAM as a full SLAM solution motivated by the feature-based GraphSLAM framework. The performance of FLAM was demonstrated through simulation within artificial flow fields that represent typical geophysical circulation phenomena: a steady single-gyre flow field and a double-gyre flow field with unsteady turbulent perturbations. The results indicate that FLAM provides significant improvements in the robots' localization accuracy and a consistent approximation of the background flow field. It is also shown that FLAM leads to smooth robot trajectory estimates.
Long-Term Inertial Navigation Aided by Dynamics of Flow Field Features
Oct 13, 2017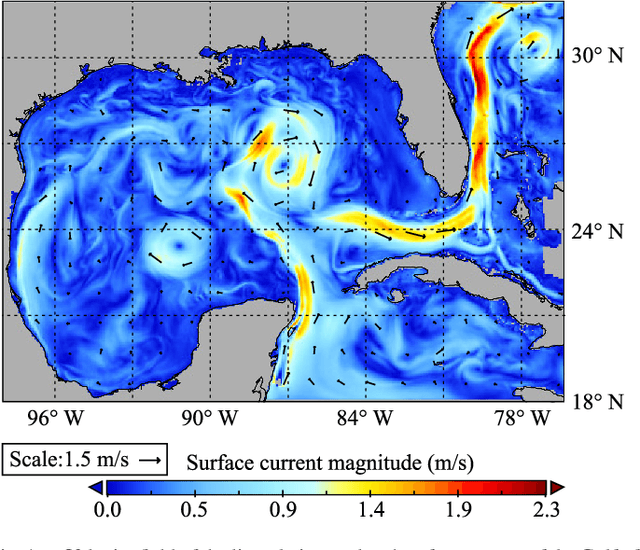
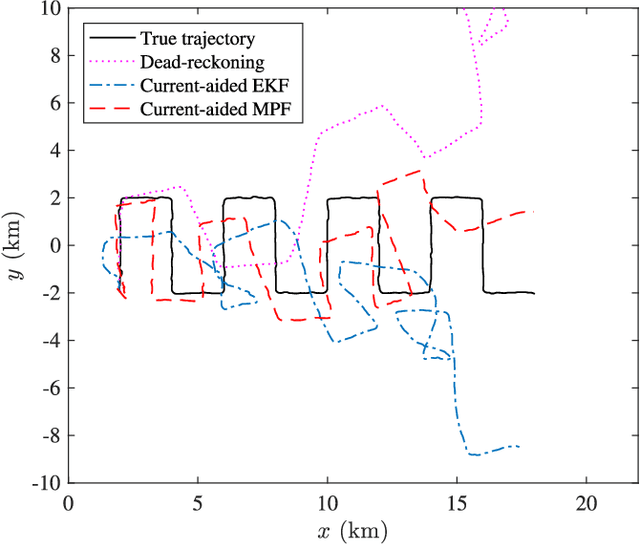
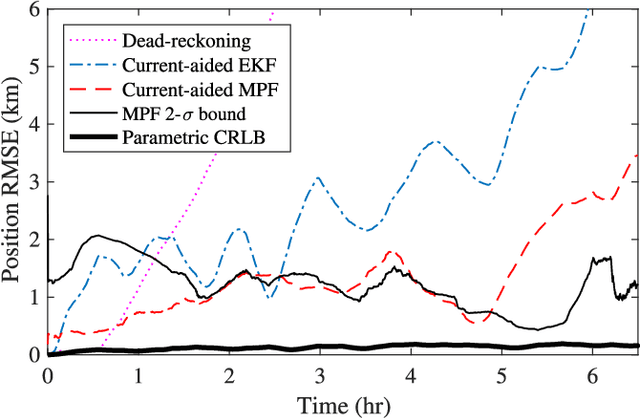
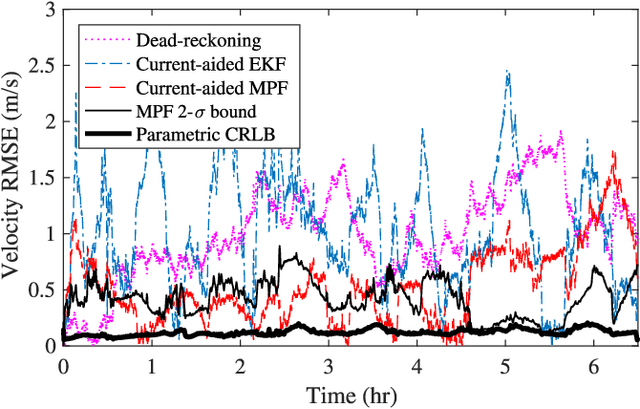
A current-aided inertial navigation framework is proposed for small autonomous underwater vehicles in long-duration operations (> 1 hour), where neither frequent surfacing nor consistent bottom-tracking are available. We instantiate this concept through mid-depth, underwater navigation. This strategy mitigates dead-reckoning uncertainty of a traditional inertial navigation system by comparing the estimate of local, ambient flow velocity with preloaded ocean current maps. The proposed navigation system is implemented through a marginalized particle filter where the vehicle's states are sequentially tracked along with sensor bias and local turbulence that is not resolved by general flow prediction. The performance of the proposed approach is first analyzed through Monte Carlo simulations in two artificial background flow fields, resembling real-world ocean circulation patterns, superposed with smaller-scale, turbulent components with Kolmogorov energy spectrum. The current-aided navigation scheme significantly improves the dead-reckoning performance of the vehicle even when unresolved, small-scale flow perturbations are present. For a 6-hour navigation with an automotive-grade inertial navigation system, the current-aided navigation scheme results in positioning estimates with under 3% uncertainty per distance traveled (UDT) in a turbulent, double-gyre flow field, and under 7.3% UDT in a turbulent, meandering jet flow field. Further evaluation with field test data and actual ocean simulation analysis demonstrates consistent performance for a 6-hour mission, positioning result with under 25% UDT for a 24-hour navigation when provided direct heading measurements, and terminal positioning estimate with 16% UDT at the cost of increased uncertainty at an early stage of the navigation.