 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeICME 2022 Few-shot LOGO detection top 9 solution
Jun 23, 2022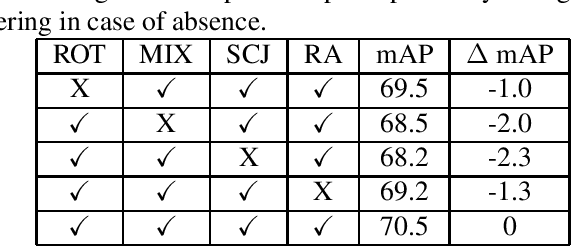
ICME-2022 few-shot logo detection competition is held in May, 2022. Participants are required to develop a single model to detect logos by handling tiny logo instances, similar brands, and adversarial images at the same time, with limited annotations. Our team achieved rank 16 and 11 in the first and second round of the competition respectively, with a final rank of 9th. This technical report summarized our major techniques used in this competitions, and potential improvement.
A dynamic programming algorithm for informative measurements and near-optimal path-planning
Sep 24, 2021
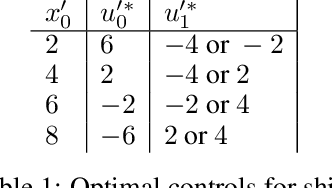
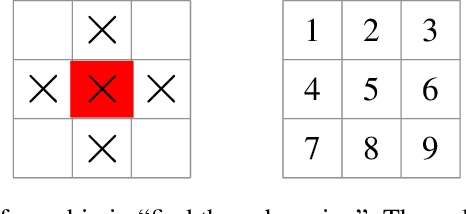
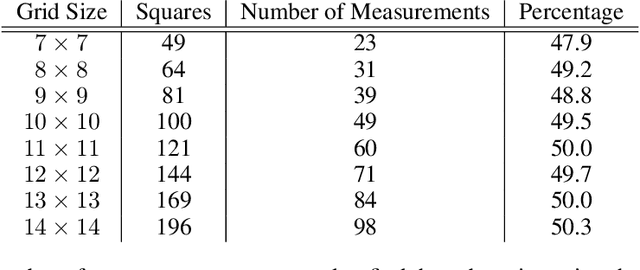
An informative measurement is the most efficient way to gain information about an unknown state. We give a first-principles derivation of a general-purpose dynamic programming algorithm that returns a sequence of informative measurements by sequentially maximizing the entropy of possible measurement outcomes. This algorithm can be used by an autonomous agent or robot to decide where best to measure next, planning a path corresponding to an optimal sequence of informative measurements. This algorithm is applicable to states and controls that are continuous or discrete, and agent dynamics that is either stochastic or deterministic; including Markov decision processes. Recent results from approximate dynamic programming and reinforcement learning, including on-line approximations such as rollout and Monte Carlo tree search, allow an agent or robot to solve the measurement task in real-time. The resulting near-optimal solutions include non-myopic paths and measurement sequences that can generally outperform, sometimes substantially, commonly-used greedy heuristics such as maximizing the entropy of each measurement outcome. This is demonstrated for a global search problem, where on-line planning with an extended local search is found to reduce the number of measurements in the search by half.