 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSmooth Path Planning Using a Gaussian Process Regression Map for Mobile Robot Navigation
Jul 08, 2024



In the context of ground robot navigation in unstructured hazardous environments, the coupling of efficient path planning with an adequate environment representation is a crucial topic in order to guarantee the robot safety while ensuring the accomplishment of its mission. This paper discusses the exploitation of an environment representation obtained via Gaussian process regression (GPR) for smooth path planning using gradient descent B\'ezier curve optimisation (BCO). A continuous differentiable GPR of the terrain traversability and obstacle distance is used to plan paths with a weighted A* discrete planner, a T-RRT sampling-based planner and BCO using A* or T-RRT computed paths as prior. Numerical experiments in procedurally generated 2D environments allowed to compare the paths planned by the described methods and highlight the benefits of the joint use of the GPR continuous representation and the BCO smooth path planning with these different priors.
Online Localisation and Colored Mesh Reconstruction Architecture for 3D Visual Feedback in Robotic Exploration Missions
Jul 21, 2022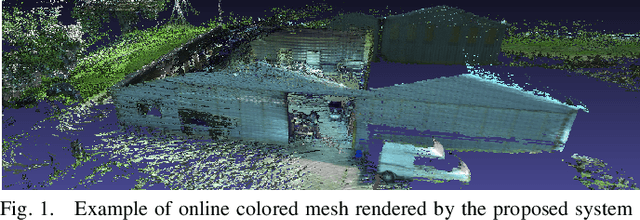
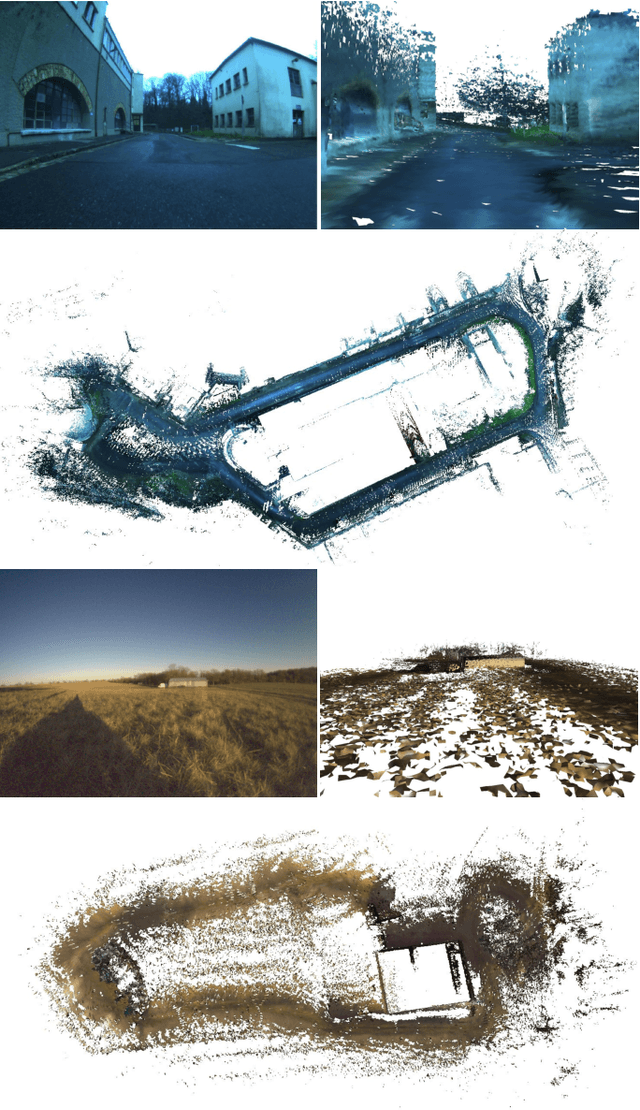
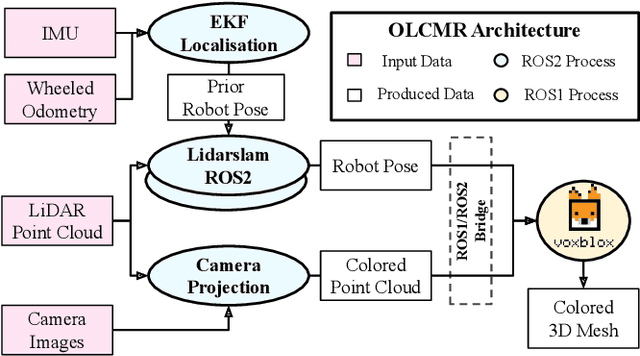
This paper introduces an Online Localisation and Colored Mesh Reconstruction (OLCMR) ROS perception architecture for ground exploration robots aiming to perform robust Simultaneous Localisation And Mapping (SLAM) in challenging unknown environments and provide an associated colored 3D mesh representation in real time. It is intended to be used by a remote human operator to easily visualise the mapped environment during or after the mission or as a development base for further researches in the field of exploration robotics. The architecture is mainly composed of carefully-selected open-source ROS implementations of a LiDAR-based SLAM algorithm alongside a colored surface reconstruction procedure using a point cloud and RGB camera images projected into the 3D space. The overall performances are evaluated on the Newer College handheld LiDAR-Vision reference dataset and on two experimental trajectories gathered on board of representative wheeled robots in respectively urban and countryside outdoor environments. Index Terms: Field Robots, Mapping, SLAM, Colored Surface Reconstruction
OV$^{2}$SLAM : A Fully Online and Versatile Visual SLAM for Real-Time Applications
Feb 08, 2021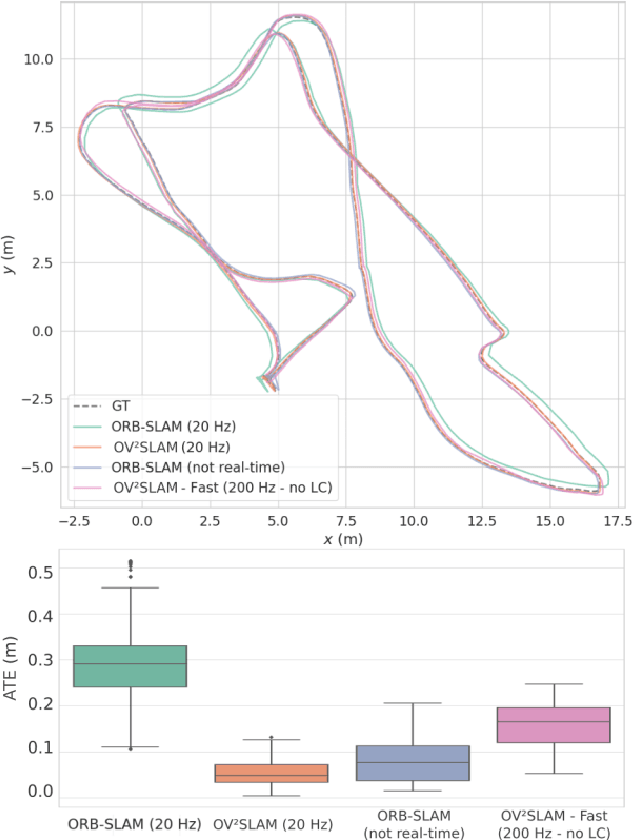
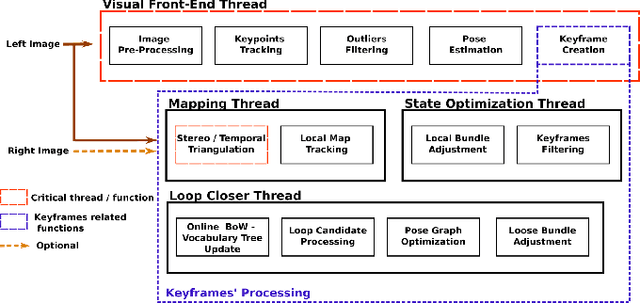
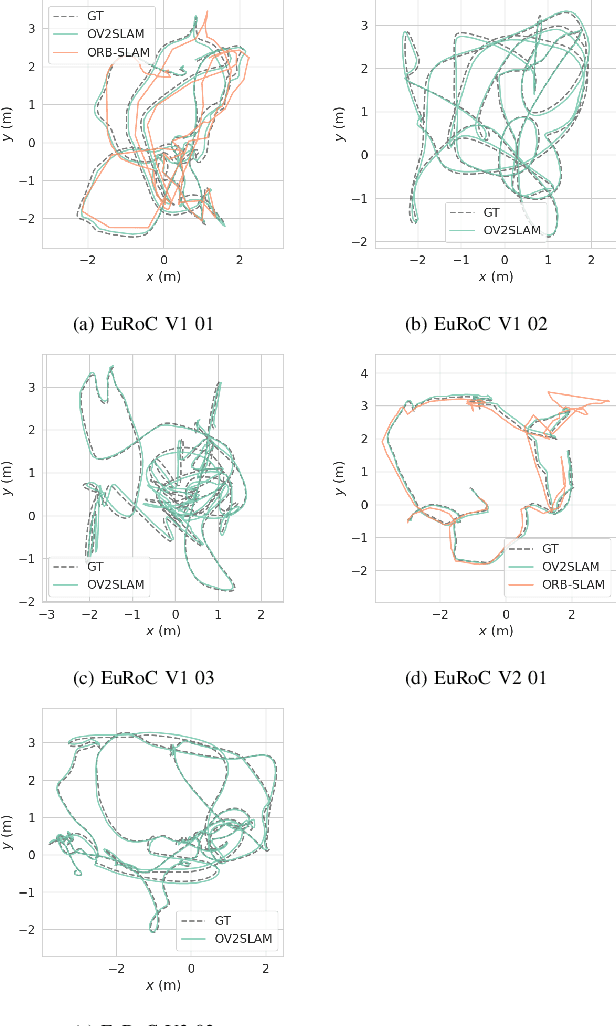
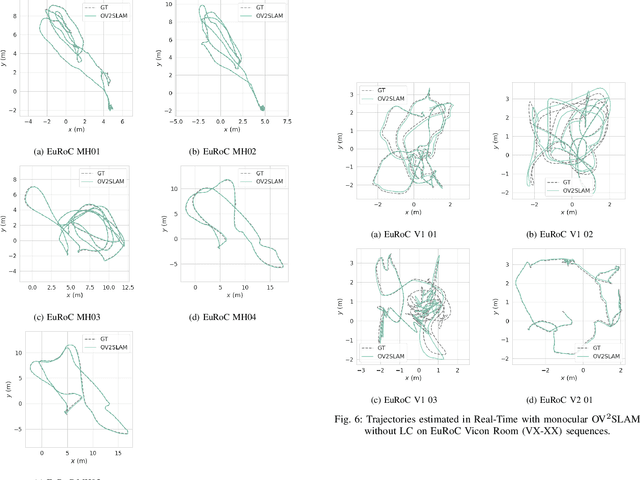
Many applications of Visual SLAM, such as augmented reality, virtual reality, robotics or autonomous driving, require versatile, robust and precise solutions, most often with real-time capability. In this work, we describe OV$^{2}$SLAM, a fully online algorithm, handling both monocular and stereo camera setups, various map scales and frame-rates ranging from a few Hertz up to several hundreds. It combines numerous recent contributions in visual localization within an efficient multi-threaded architecture. Extensive comparisons with competing algorithms shows the state-of-the-art accuracy and real-time performance of the resulting algorithm. For the benefit of the community, we release the source code: \url{https://github.com/ov2slam/ov2slam}.
* Accepted for publication in IEEE Robotics and Automation Letters (RA-L). Code is available at : \url{https://github.com/ov2slam/ov2slam}
Learning-based vs Model-free Adaptive Control of a MAV under Wind Gust
Jan 29, 2021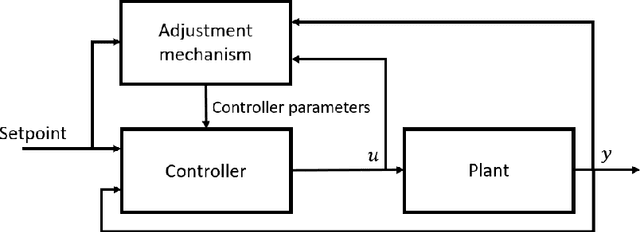
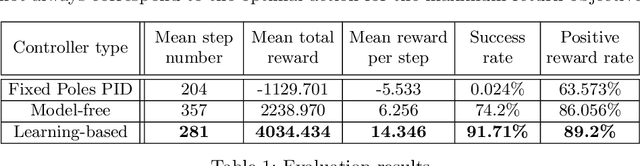
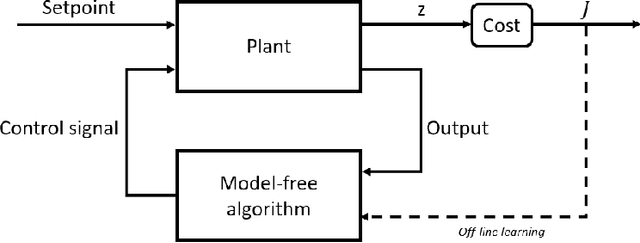
Navigation problems under unknown varying conditions are among the most important and well-studied problems in the control field. Classic model-based adaptive control methods can be applied only when a convenient model of the plant or environment is provided. Recent model-free adaptive control methods aim at removing this dependency by learning the physical characteristics of the plant and/or process directly from sensor feedback. Although there have been prior attempts at improving these techniques, it remains an open question as to whether it is possible to cope with real-world uncertainties in a control system that is fully based on either paradigm. We propose a conceptually simple learning-based approach composed of a full state feedback controller, tuned robustly by a deep reinforcement learning framework based on the Soft Actor-Critic algorithm. We compare it, in realistic simulations, to a model-free controller that uses the same deep reinforcement learning framework for the control of a micro aerial vehicle under wind gust. The results indicate the great potential of learning-based adaptive control methods in modern dynamical systems.
Sim-to-Real Transfer with Incremental Environment Complexity for Reinforcement Learning of Depth-Based Robot Navigation
Apr 30, 2020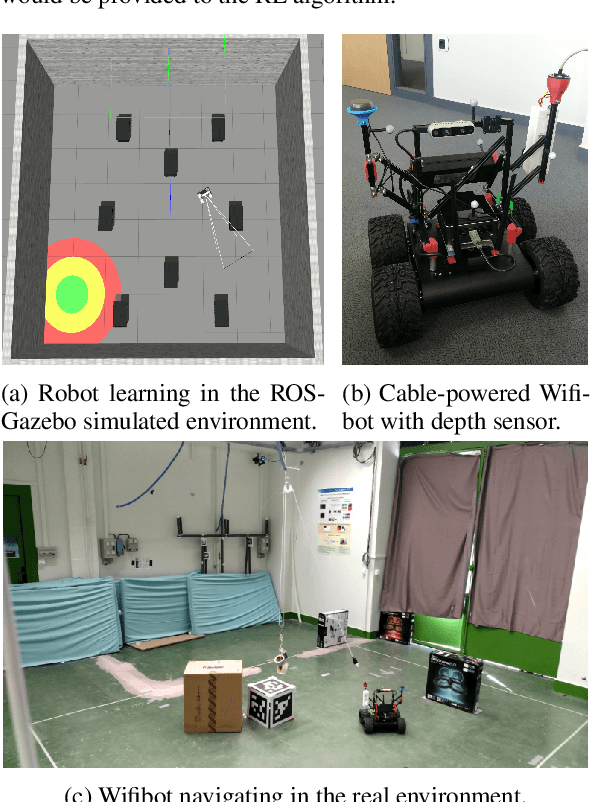
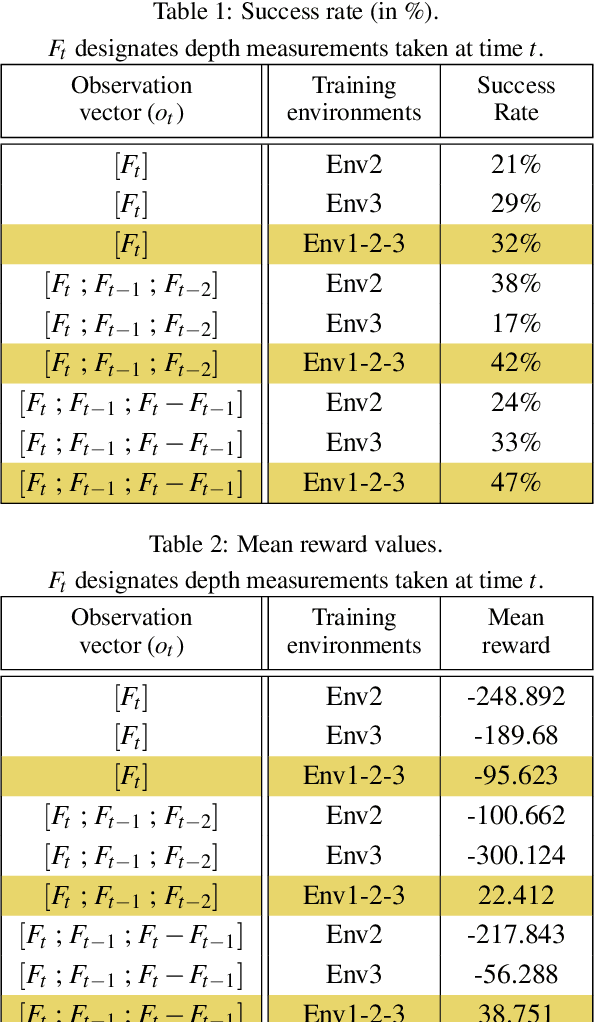
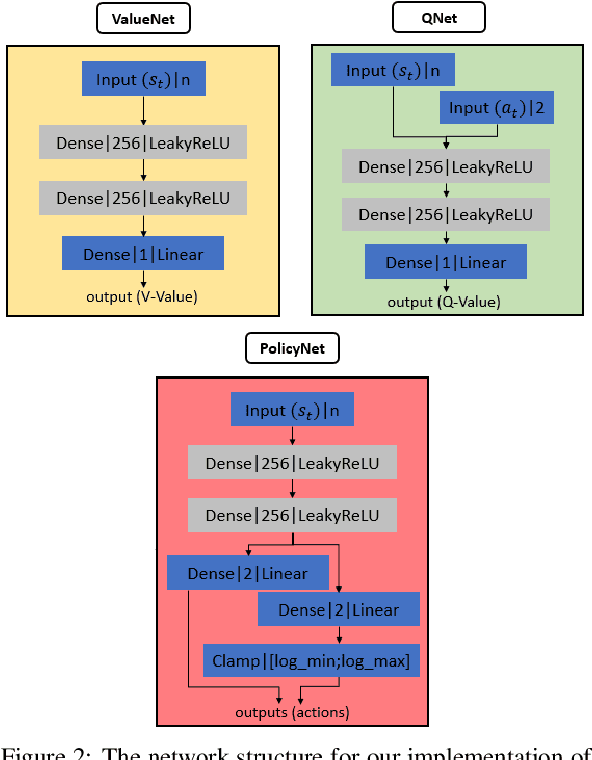
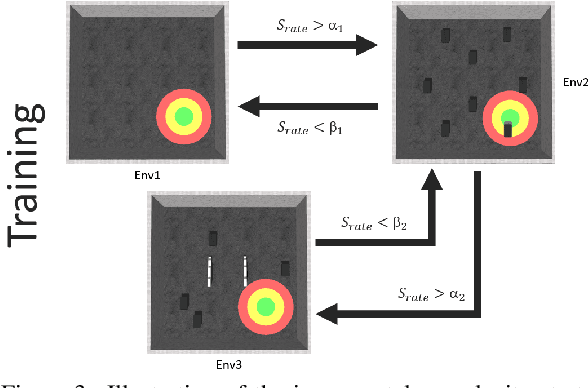
Transferring learning-based models to the real world remains one of the hardest problems in model-free control theory. Due to the cost of data collection on a real robot and the limited sample efficiency of Deep Reinforcement Learning algorithms, models are usually trained in a simulator which theoretically provides an infinite amount of data. Despite offering unbounded trial and error runs, the reality gap between simulation and the physical world brings little guarantee about the policy behavior in real operation. Depending on the problem, expensive real fine-tuning and/or a complex domain randomization strategy may be required to produce a relevant policy. In this paper, a Soft-Actor Critic (SAC) training strategy using incremental environment complexity is proposed to drastically reduce the need for additional training in the real world. The application addressed is depth-based mapless navigation, where a mobile robot should reach a given waypoint in a cluttered environment with no prior mapping information. Experimental results in simulated and real environments are presented to assess quantitatively the efficiency of the proposed approach, which demonstrated a success rate twice higher than a naive strategy.
Technical Report: Co-learning of geometry and semantics for online 3D mapping
Nov 04, 2019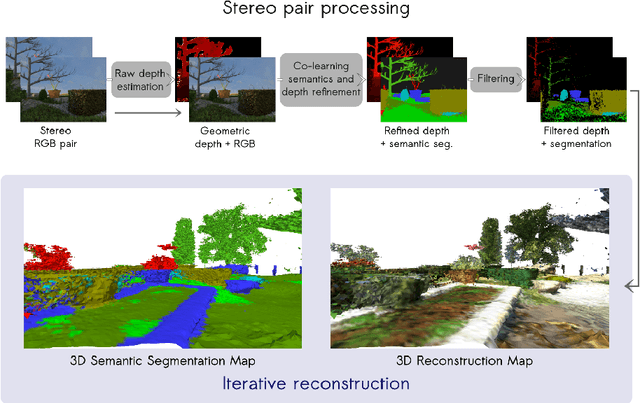

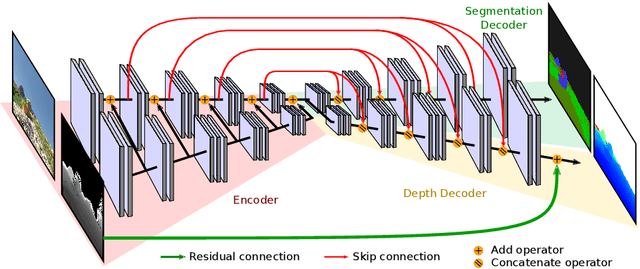
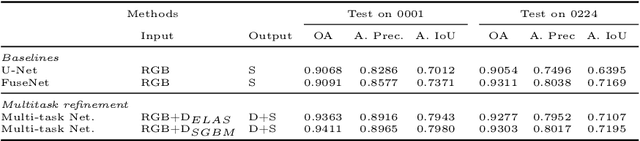
This paper is a technical report about our submission for the ECCV 2018 3DRMS Workshop Challenge on Semantic 3D Reconstruction \cite{Tylecek2018rms}. In this paper, we address 3D semantic reconstruction for autonomous navigation using co-learning of depth map and semantic segmentation. The core of our pipeline is a deep multi-task neural network which tightly refines depth and also produces accurate semantic segmentation maps. Its inputs are an image and a raw depth map produced from a pair of images by standard stereo vision. The resulting semantic 3D point clouds are then merged in order to create a consistent 3D mesh, in turn used to produce dense semantic 3D reconstruction maps. The performances of each step of the proposed method are evaluated on the dataset and multiple tasks of the 3DRMS Challenge, and repeatedly surpass state-of-the-art approaches.
AQUALOC: An Underwater Dataset for Visual-Inertial-Pressure Localization
Oct 31, 2019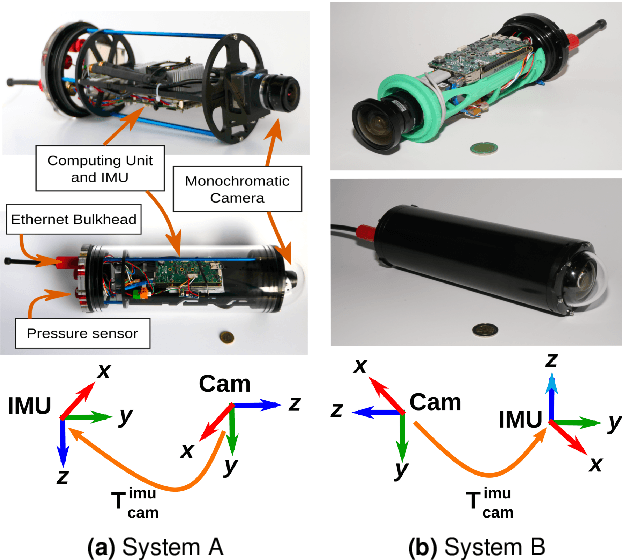
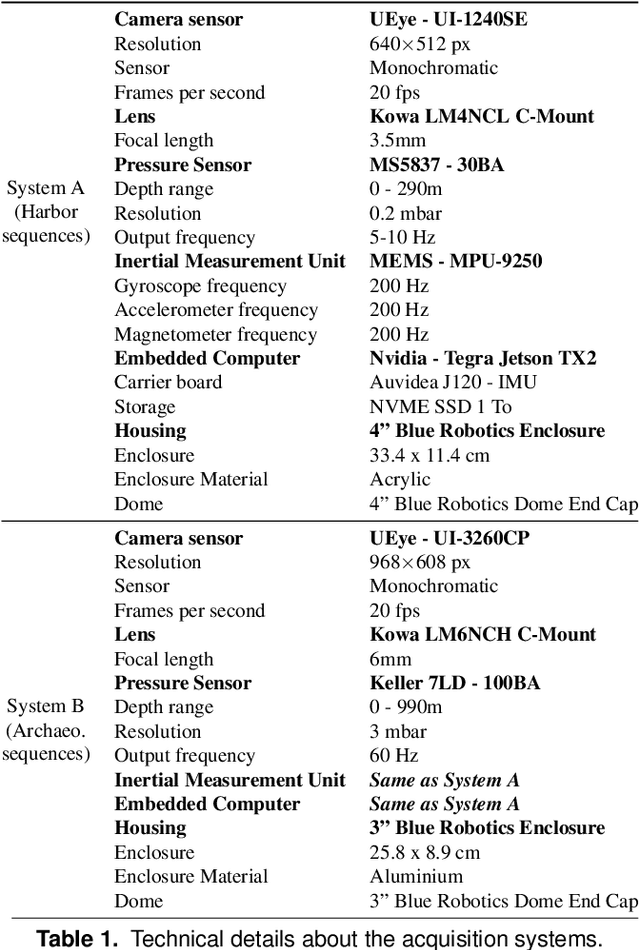
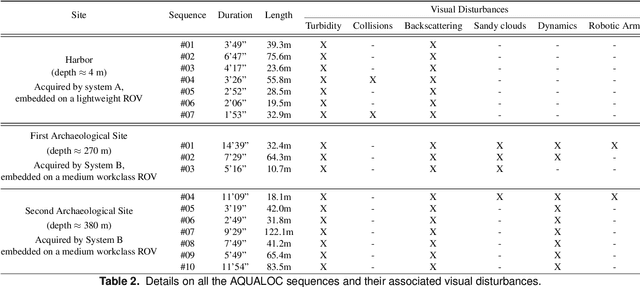
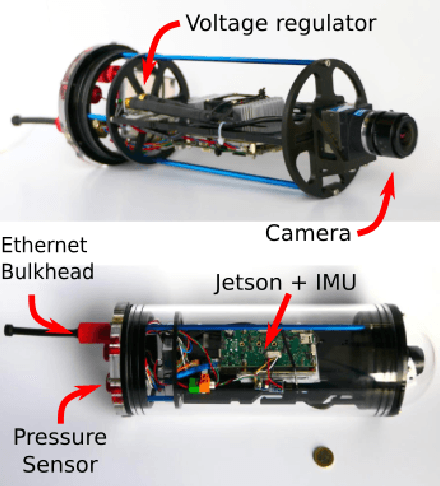
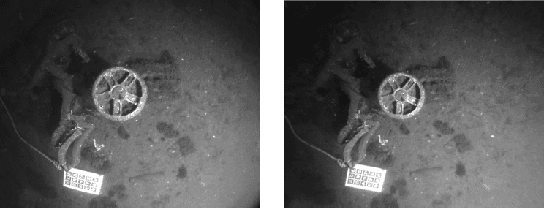
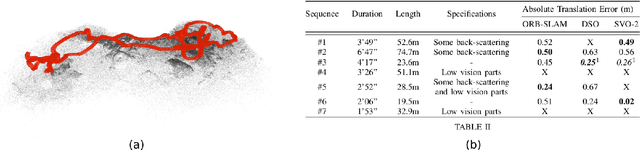
We present a new dataset, dedicated to the development of simultaneous localization and mapping methods for underwater vehicles navigating close to the seabed. The data sequences composing this dataset are recorded in three different environments: a harbor at a depth of a few meters, a first archaeological site at a depth of 270 meters and a second site at a depth of 380 meters. The data acquisition is performed using Remotely Operated Vehicles equipped with a monocular monochromatic camera, a low-cost inertial measurement unit, a pressure sensor and a computing unit, all embedded in a single enclosure. The sensors' measurements are recorded synchronously on the computing unit and seventeen sequences have been created from all the acquired data. These sequences are made available in the form of ROS bags and as raw data. For each sequence, a trajectory has also been computed offline using a Structure-from-Motion library in order to allow the comparison with real-time localization methods. With the release of this dataset, we wish to provide data difficult to acquire and to encourage the development of vision-based localization methods dedicated to the underwater environment. The dataset can be downloaded from: http://www.lirmm.fr/aqualoc/
The Aqualoc Dataset: Towards Real-Time Underwater Localization from a Visual-Inertial-Pressure Acquisition System
Sep 19, 2018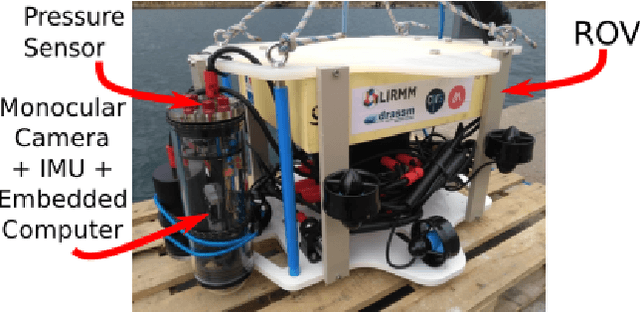
This paper presents a new underwater dataset acquired from a visual-inertial-pressure acquisition system and meant to be used to benchmark visual odometry, visual SLAM and multi-sensors SLAM solutions. The dataset is publicly available and contains ground-truth trajectories for evaluation.
Real-time Monocular Visual Odometry for Turbid and Dynamic Underwater Environments
Jul 03, 2018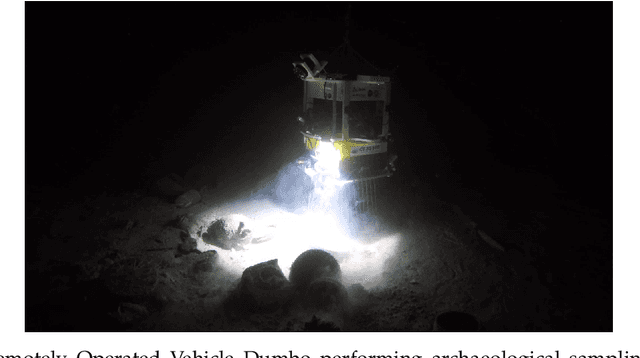
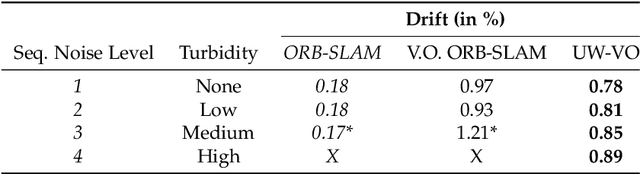
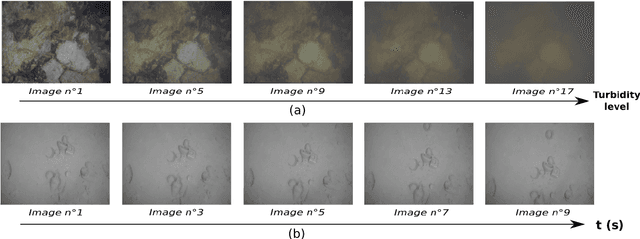
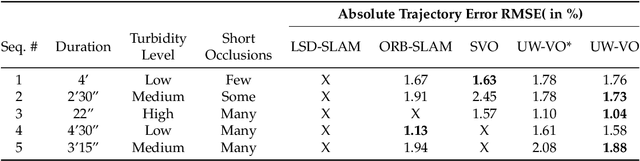
In the context of robotic underwater operations, the visual degradations induced by the medium properties make difficult the exclusive use of cameras for localization purpose. Hence, most localization methods are based on expensive navigational sensors associated with acoustic positioning. On the other hand, visual odometry and visual SLAM have been exhaustively studied for aerial or terrestrial applications, but state-of-the-art algorithms fail underwater. In this paper we tackle the problem of using a simple low-cost camera for underwater localization and propose a new monocular visual odometry method dedicated to the underwater environment. We evaluate different tracking methods and show that optical flow based tracking is more suited to underwater images than classical approaches based on descriptors. We also propose a keyframe-based visual odometry approach highly relying on nonlinear optimization. The proposed algorithm has been assessed on both simulated and real underwater datasets and outperforms state-of-the-art visual SLAM methods under many of the most challenging conditions. The main application of this work is the localization of Remotely Operated Vehicles (ROVs) used for underwater archaeological missions but the developed system can be used in any other applications as long as visual information is available.
Enhancing Mobile Object Classification Using Geo-referenced Maps and Evidential Grids
Jan 22, 2014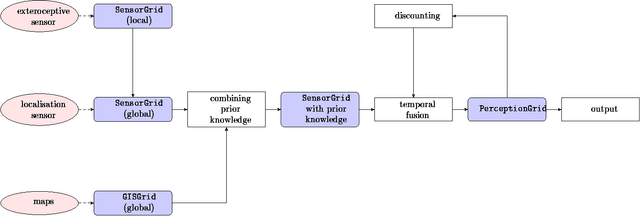
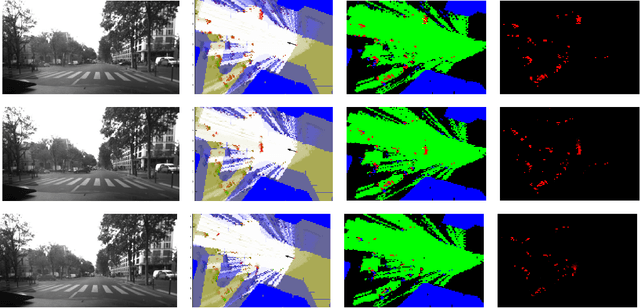
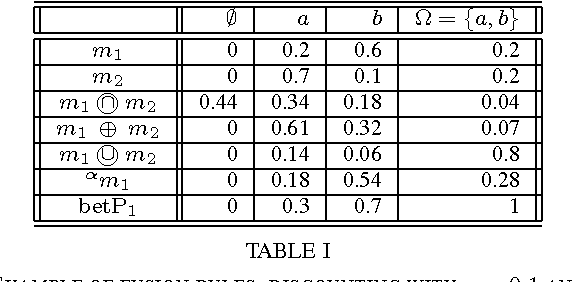
Evidential grids have recently shown interesting properties for mobile object perception. Evidential grids are a generalisation of Bayesian occupancy grids using Dempster- Shafer theory. In particular, these grids can handle efficiently partial information. The novelty of this article is to propose a perception scheme enhanced by geo-referenced maps used as an additional source of information, which is fused with a sensor grid. The paper presents the key stages of such a data fusion process. An adaptation of conjunctive combination rule is presented to refine the analysis of the conflicting information. The method uses temporal accumulation to make the distinction between stationary and mobile objects, and applies contextual discounting for modelling information obsolescence. As a result, the method is able to better characterise the occupied cells by differentiating, for instance, moving objects, parked cars, urban infrastructure and buildings. Experiments carried out on real- world data illustrate the benefits of such an approach.
* 6 pp. arXiv admin note: substantial text overlap with arXiv:1207.1016