 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDelGrad: Exact gradients in spiking networks for learning transmission delays and weights
Apr 30, 2024



Spiking neural networks (SNNs) inherently rely on the timing of signals for representing and processing information. Transmission delays play an important role in shaping these temporal characteristics. Recent work has demonstrated the substantial advantages of learning these delays along with synaptic weights, both in terms of accuracy and memory efficiency. However, these approaches suffer from drawbacks in terms of precision and efficiency, as they operate in discrete time and with approximate gradients, while also requiring membrane potential recordings for calculating parameter updates. To alleviate these issues, we propose an analytical approach for calculating exact loss gradients with respect to both synaptic weights and delays in an event-based fashion. The inclusion of delays emerges naturally within our proposed formalism, enriching the model's search space with a temporal dimension. Our algorithm is purely based on the timing of individual spikes and does not require access to other variables such as membrane potentials. We explicitly compare the impact on accuracy and parameter efficiency of different types of delays - axonal, dendritic and synaptic. Furthermore, while previous work on learnable delays in SNNs has been mostly confined to software simulations, we demonstrate the functionality and benefits of our approach on the BrainScaleS-2 neuromorphic platform.
Lu.i -- A low-cost electronic neuron for education and outreach
Apr 25, 2024



With an increasing presence of science throughout all parts of society, there is a rising expectation for researchers to effectively communicate their work and, equally, for teachers to discuss contemporary findings in their classrooms. While the community can resort to an established set of teaching aids for the fundamental concepts of most natural sciences, there is a need for similarly illustrative experiments and demonstrators in neuroscience. We therefore introduce Lu.i: a parametrizable electronic implementation of the leaky-integrate-and-fire neuron model in an engaging form factor. These palm-sized neurons can be used to visualize and experience the dynamics of individual cells and small spiking neural networks. When stimulated with real or simulated sensory input, Lu.i demonstrates brain-inspired information processing in the hands of a student. As such, it is actively used at workshops, in classrooms, and for science communication. As a versatile tool for teaching and outreach, Lu.i nurtures the comprehension of neuroscience research and neuromorphic engineering among future generations of scientists and in the general public.
A Scalable Approach to Modeling on Accelerated Neuromorphic Hardware
Mar 21, 2022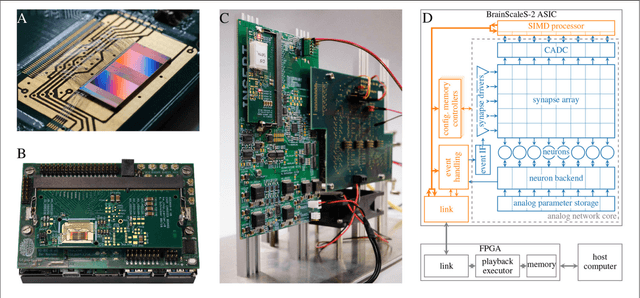
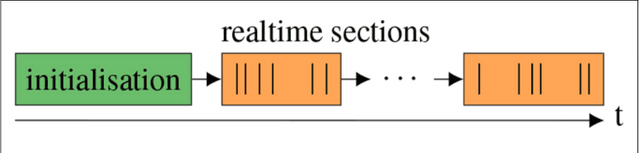
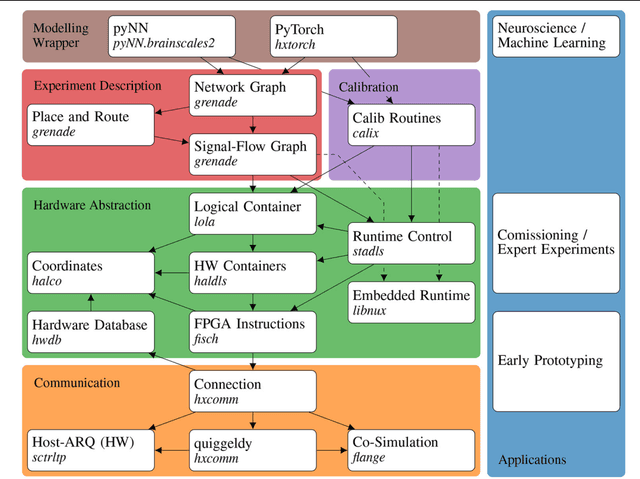
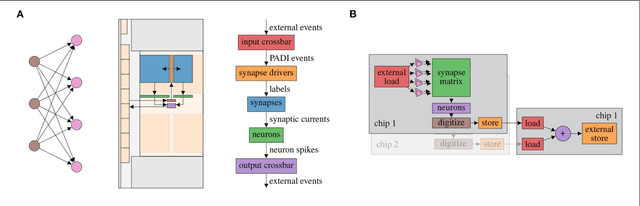
Neuromorphic systems open up opportunities to enlarge the explorative space for computational research. However, it is often challenging to unite efficiency and usability. This work presents the software aspects of this endeavor for the BrainScaleS-2 system, a hybrid accelerated neuromorphic hardware architecture based on physical modeling. We introduce key aspects of the BrainScaleS-2 Operating System: experiment workflow, API layering, software design, and platform operation. We present use cases to discuss and derive requirements for the software and showcase the implementation. The focus lies on novel system and software features such as multi-compartmental neurons, fast re-configuration for hardware-in-the-loop training, applications for the embedded processors, the non-spiking operation mode, interactive platform access, and sustainable hardware/software co-development. Finally, we discuss further developments in terms of hardware scale-up, system usability and efficiency.
The Yin-Yang dataset
Feb 16, 2021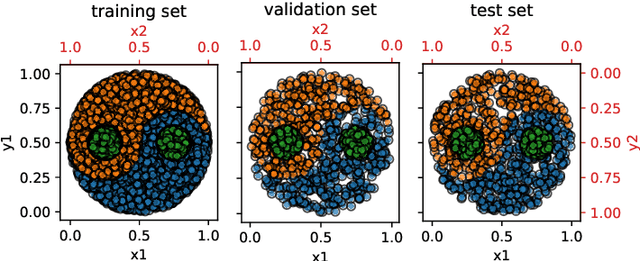
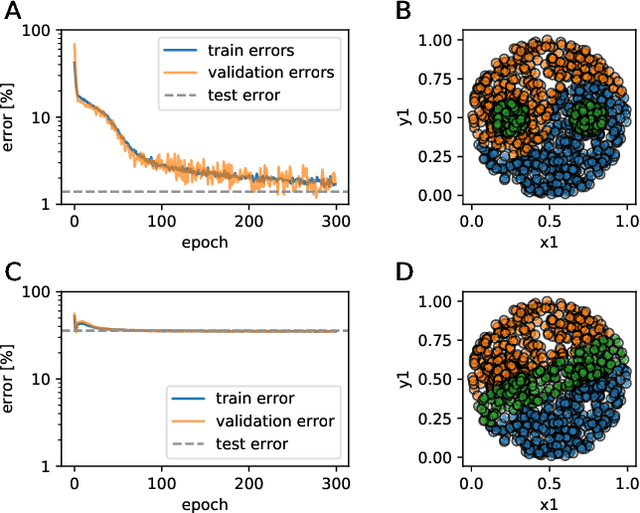
The Yin-Yang dataset was developed for research on biologically plausible error backpropagation and deep learning in spiking neural networks. It serves as an alternative to classic deep learning datasets, especially in algorithm- and model-prototyping scenarios, by providing several advantages. First, it is smaller and therefore faster to learn, thereby being better suited for the deployment on neuromorphic chips with limited network sizes. Second, it exhibits a very clear gap between the accuracies achievable using shallow as compared to deep neural networks.
Versatile emulation of spiking neural networks on an accelerated neuromorphic substrate
Dec 30, 2019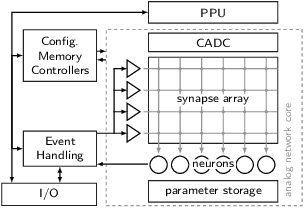
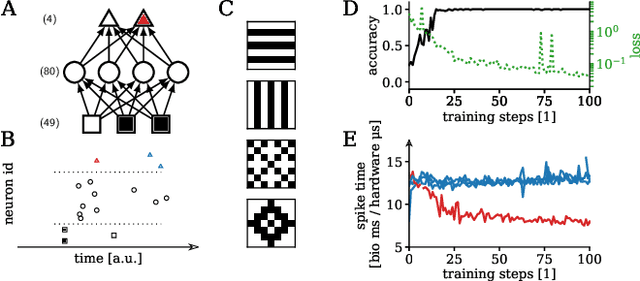
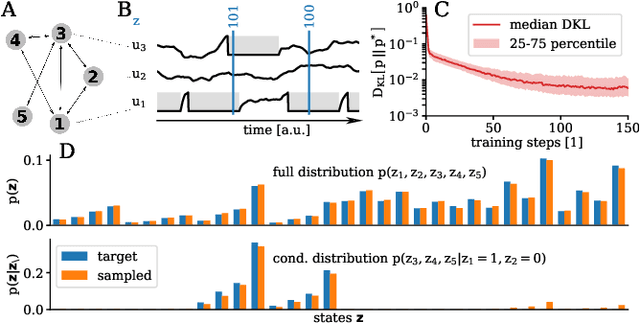
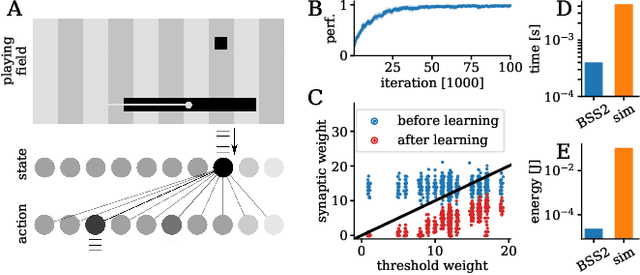
We present first experimental results on the novel BrainScaleS-2 neuromorphic architecture based on an analog neuro-synaptic core and augmented by embedded microprocessors for complex plasticity and experiment control. The high acceleration factor of 1000 compared to biological dynamics enables the execution of computationally expensive tasks, by allowing the fast emulation of long-duration experiments or rapid iteration over many consecutive trials. The flexibility of our architecture is demonstrated in a suite of five distinct experiments, which emphasize different aspects of the BrainScaleS-2 system.
Fast and deep neuromorphic learning with time-to-first-spike coding
Dec 24, 2019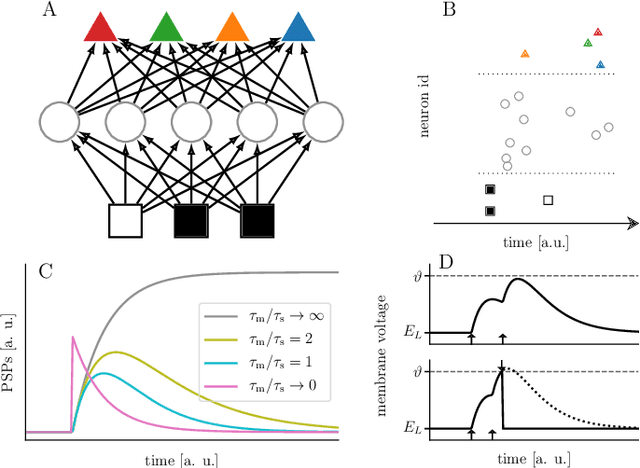
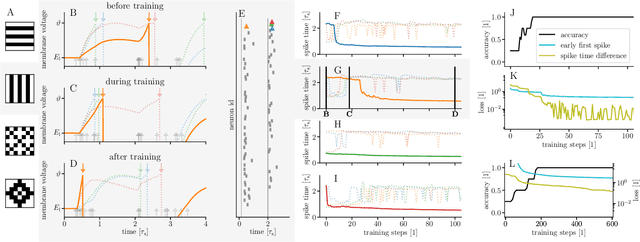
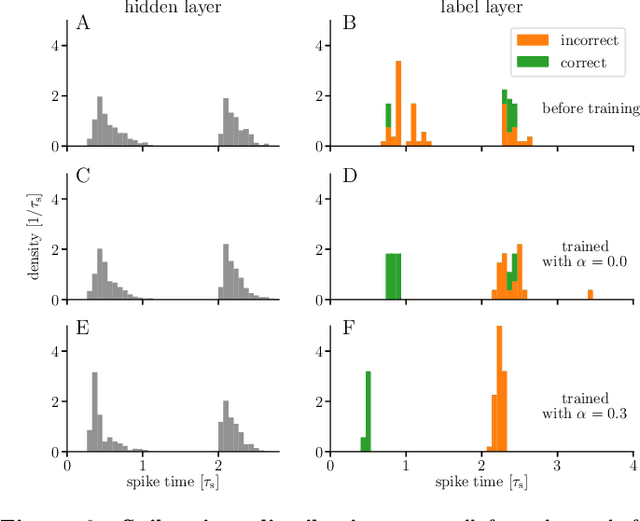
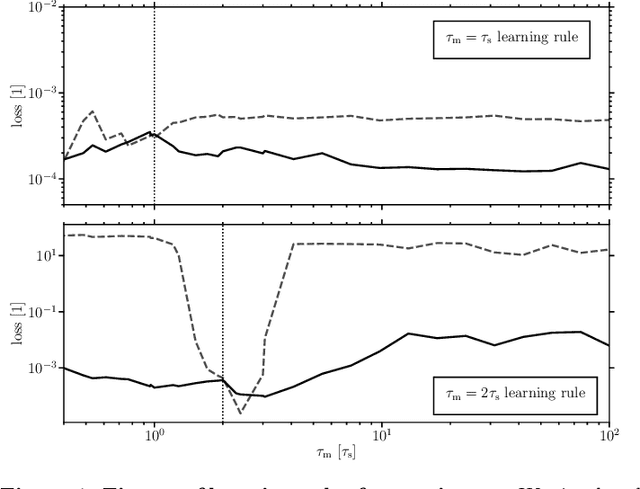
For a biological agent operating under environmental pressure, energy consumption and reaction times are of critical importance. Similarly, engineered systems also strive for short time-to-solution and low energy-to-solution characteristics. At the level of neuronal implementation, this implies achieving the desired results with as few and as early spikes as possible. In the time-to-first-spike coding framework, both of these goals are inherently emerging features of learning. Here, we describe a rigorous derivation of error-backpropagation-based learning for hierarchical networks of leaky integrate-and-fire neurons. We explicitly address two issues that are relevant for both biological plausibility and applicability to neuromorphic substrates by incorporating dynamics with finite time constants and by optimizing the backward pass with respect to substrate variability. This narrows the gap between previous models of first-spike-time learning and biological neuronal dynamics, thereby also enabling fast and energy-efficient inference on analog neuromorphic devices that inherit these dynamics from their biological archetypes, which we demonstrate on two generations of the BrainScaleS analog neuromorphic architecture.