 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Sequence and Blend Robot Skills via Differentiable Optimization
Jun 01, 2022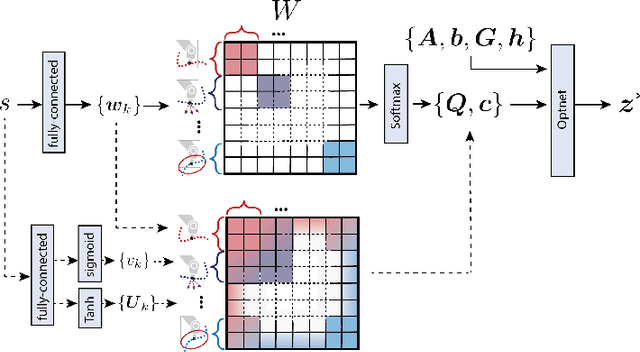
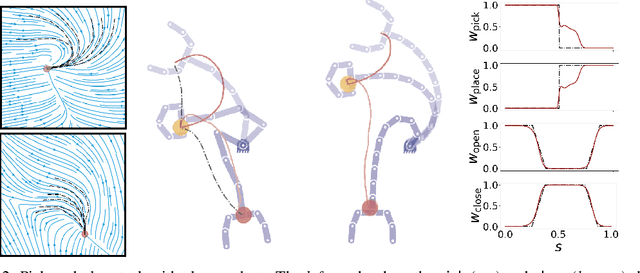
In contrast to humans and animals who naturally execute seamless motions, learning and smoothly executing sequences of actions remains a challenge in robotics. This paper introduces a novel skill-agnostic framework that learns to sequence and blend skills based on differentiable optimization. Our approach encodes sequences of previously-defined skills as quadratic programs (QP), whose parameters determine the relative importance of skills along the task. Seamless skill sequences are then learned from demonstrations by exploiting differentiable optimization layers and a tailored loss formulated from the QP optimality conditions. Via the use of differentiable optimization, our work offers novel perspectives on multitask control. We validate our approach in a pick-and-place scenario with planar robots, a pouring experiment with a real humanoid robot, and a bimanual sweeping task with a human model.
A Soft Humanoid Hand with In-Finger Visual Perception
Jun 05, 2020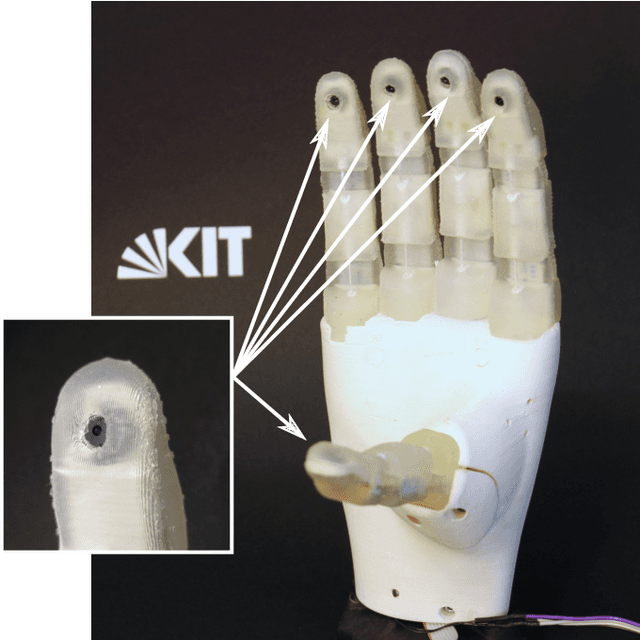
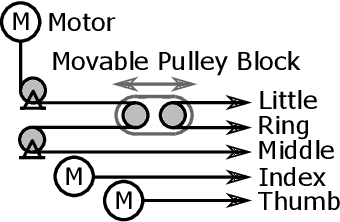
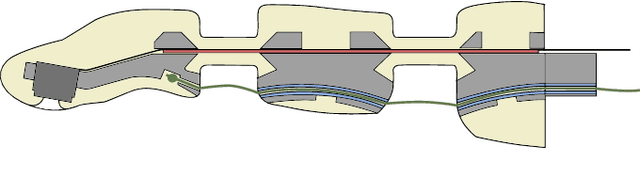
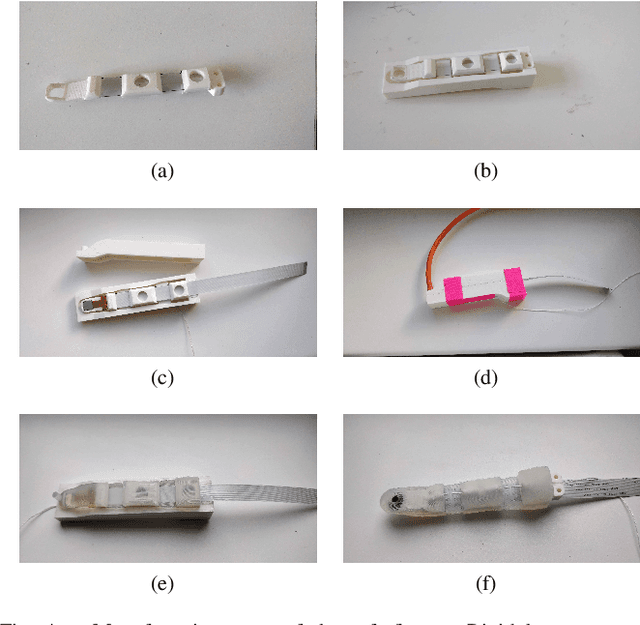
We present a novel underactued humanoid five finger soft hand, the KIT \softhand, which is equipped with cameras in the fingertips and integrates a high performance embedded system for visual processing and control. We describe the actuation mechanism of the hand and the tendon-driven soft finger design with internally routed high-bandwidth flat-flex cables. For efficient on-board parallel processing of visual data from the cameras in each fingertip, we present a hybrid embedded architecture consisting of a field programmable logic array (FPGA) and a microcontroller that allows the realization of visual object segmentation based on convolutional neural networks. We evaluate the hand design by conducting durability experiments with one finger and quantify the grasp performance in terms of grasping force, speed and grasp success. The results show that the hand exhibits a grasp force of 31.8 N and a mechanical durability of the finger of more than 15.000 closing cycles. Finally, we evaluate the accuracy of visual object segmentation during the different phases of the grasping process using five different objects. Hereby, an accuracy above 90 % can be achieved.