 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeveloper Insights into Designing AI-Based Computer Perception Tools
Aug 29, 2025Artificial intelligence (AI)-based computer perception (CP) technologies use mobile sensors to collect behavioral and physiological data for clinical decision-making. These tools can reshape how clinical knowledge is generated and interpreted. However, effective integration of these tools into clinical workflows depends on how developers balance clinical utility with user acceptability and trustworthiness. Our study presents findings from 20 in-depth interviews with developers of AI-based CP tools. Interviews were transcribed and inductive, thematic analysis was performed to identify 4 key design priorities: 1) to account for context and ensure explainability for both patients and clinicians; 2) align tools with existing clinical workflows; 3) appropriately customize to relevant stakeholders for usability and acceptability; and 4) push the boundaries of innovation while aligning with established paradigms. Our findings highlight that developers view themselves as not merely technical architects but also ethical stewards, designing tools that are both acceptable by users and epistemically responsible (prioritizing objectivity and pushing clinical knowledge forward). We offer the following suggestions to help achieve this balance: documenting how design choices around customization are made, defining limits for customization choices, transparently conveying information about outputs, and investing in user training. Achieving these goals will require interdisciplinary collaboration between developers, clinicians, and ethicists.
Exploring with Sticky Mittens: Reinforcement Learning with Expert Interventions via Option Templates
Feb 25, 2022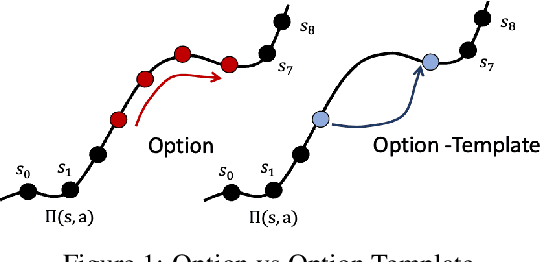
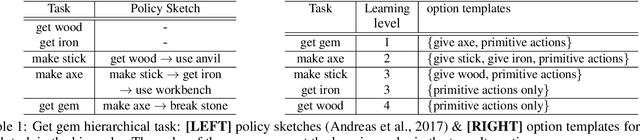
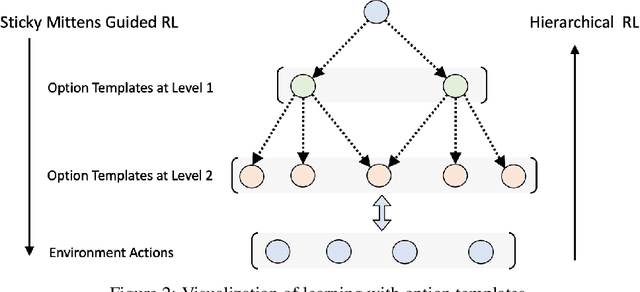
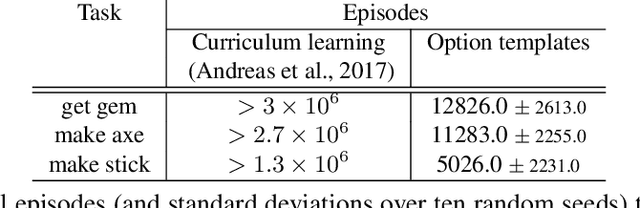
Environments with sparse rewards and long horizons pose a significant challenge for current reinforcement learning algorithms. A key feature enabling humans to learn challenging control tasks is that they often receive expert intervention that enables them to understand the high-level structure of the task before mastering low-level control actions. We propose a framework for leveraging expert intervention to solve long-horizon reinforcement learning tasks. We consider option templates, which are specifications encoding a potential option that can be trained using reinforcement learning. We formulate expert intervention as allowing the agent to execute option templates before learning an implementation. This enables them to use an option, before committing costly resources to learning it. We evaluate our approach on three challenging reinforcement learning problems, showing that it outperforms state of-the-art approaches by an order of magnitude. Project website at https://sites.google.com/view/stickymittens