 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFMCW Lidar Beyond Nyquist by Instantaneous Frequency Fitting
May 13, 2026Frequency-modulated continuous-wave (FMCW) lidar conventionally estimates distance and velocity from constant beat frequencies generated through interferometry. Existing FMCW implementations emphasize simple signal processing -- e.g., beat frequency estimation via a fast Fourier transform (FFT) algorithm plus peak-finding -- which results in hardware-focused solutions requiring linear swept-frequency laser sources or linearized resampling. However, the maximum achievable distance by this method is limited by the need to sample the interference signal without aliasing. In this work, we propose two signal processing methods: matched filtering and instantaneous frequency fitting. These two methods can recover larger ranges of distance and velocity by considering the full waveform despite aliasing in the frequency domain. Furthermore, the FMCW lidar signal is often corrupted by phase noise, and we show that the instantaneous frequency fitting approach is more robust than matched filtering by considering the deviation in the phase. We present comprehensive simulation studies along with theoretical analysis using the misspecified Cramér--Rao bound. As these methods are flexible to arbitrary frequency modulation, we also show results for non-linear modulations that could yield better sensitivity to distance and velocity compared to the popular triangular modulation.
Indoor Airflow Imaging Using Physics-Informed Background-Oriented Schlieren Tomography
Sep 17, 2025We develop a framework for non-invasive volumetric indoor airflow estimation from a single viewpoint using background-oriented schlieren (BOS) measurements and physics-informed reconstruction. Our framework utilizes a light projector that projects a pattern onto a target back-wall and a camera that observes small distortions in the light pattern. While the single-view BOS tomography problem is severely ill-posed, our proposed framework addresses this using: (1) improved ray tracing, (2) a physics-based light rendering approach and loss formulation, and (3) a physics-based regularization using a physics-informed neural network (PINN) to ensure that the reconstructed airflow is consistent with the governing equations for buoyancy-driven flows.
Seeing Around Corners with Edge-Resolved Transient Imaging
Feb 17, 2020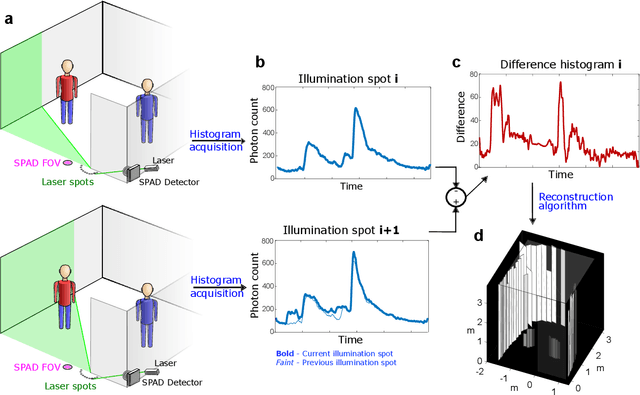
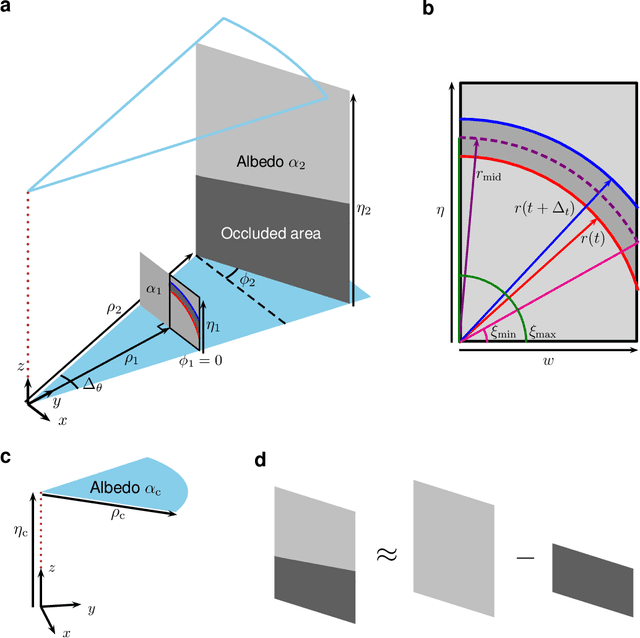
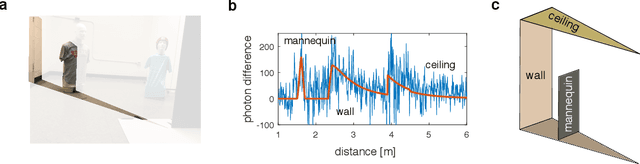
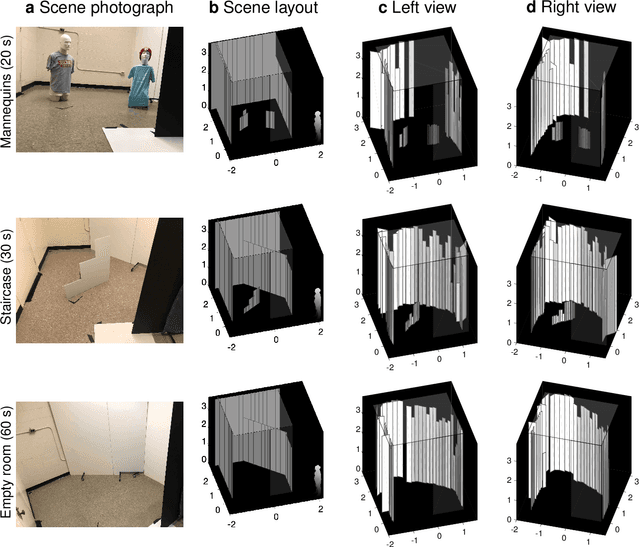
Non-line-of-sight (NLOS) imaging is a rapidly growing field seeking to form images of objects outside the field of view, with potential applications in search and rescue, reconnaissance, and even medical imaging. The critical challenge of NLOS imaging is that diffuse reflections scatter light in all directions, resulting in weak signals and a loss of directional information. To address this problem, we propose a method for seeing around corners that derives angular resolution from vertical edges and longitudinal resolution from the temporal response to a pulsed light source. We introduce an acquisition strategy, scene response model, and reconstruction algorithm that enable the formation of 2.5-dimensional representations -- a plan view plus heights -- and a 180$^{\circ}$ field of view (FOV) for large-scale scenes. Our experiments demonstrate accurate reconstructions of hidden rooms up to 3 meters in each dimension.