 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Cross Density Kernel Function: A Novel Framework to Quantify Statistical Dependence for Random Processes
Dec 09, 2022



This paper proposes a novel multivariate definition of statistical dependence using a functional methodology inspired by Alfred R\'enyi. We define a new symmetric and self-adjoint cross density kernel through a recursive bidirectional statistical mapping between conditional densities of continuous random processes, which estimates their statistical dependence. Therefore, the kernel eigenspectrum is proposed as a new multivariate statistical dependence measure, and the formulation requires fewer assumptions about the data generation model than current methods. The measure can also be estimated from realizations. The proposed functional maximum correlation algorithm (FMCA) is applied to a learning architecture with two multivariate neural networks. The FMCA optimal solution is an equilibrium point that estimates the eigenspectrum of the cross density kernel. Preliminary results with synthetic data and medium size image datasets corroborate the theory. Four different strategies of applying the cross density kernel are thoroughly discussed and implemented to show the versatility and stability of the methodology, and it transcends supervised learning. When two random processes are high-dimensional real-world images and white uniform noise, respectively, the algorithm learns a factorial code i.e., the occurrence of a code guarantees that a certain input in the training set was present, which is quite important for feature learning.
Robust Dependence Measure using RKHS based Uncertainty Moments and Optimal Transport
Nov 03, 2022



Reliable measurement of dependence between variables is essential in many applications of statistics and machine learning. Current approaches for dependence estimation, especially density-based approaches, lack in precision, robustness and/or interpretability (in terms of the type of dependence being estimated). We propose a two-step approach for dependence quantification between random variables: 1) We first decompose the probability density functions (PDF) of the variables involved in terms of multiple local moments of uncertainty that systematically and precisely identify the different regions of the PDF (with special emphasis on the tail-regions). 2) We then compute an optimal transport map to measure the geometric similarity between the corresponding sets of decomposed local uncertainty moments of the variables. Dependence is then determined by the degree of one-to-one correspondence between the respective uncertainty moments of the variables in the optimal transport map. We utilize a recently introduced Gaussian reproducing kernel Hilbert space (RKHS) based framework for multi-moment uncertainty decomposition of the variables. Being based on the Gaussian RKHS, our approach is robust towards outliers and monotone transformations of data, while the multiple moments of uncertainty provide high resolution and interpretability of the type of dependence being quantified. We support these claims through some preliminary results using simulated data.
Quantifying Model Uncertainty for Semantic Segmentation using Operators in the RKHS
Nov 03, 2022



Deep learning models for semantic segmentation are prone to poor performance in real-world applications due to the highly challenging nature of the task. Model uncertainty quantification (UQ) is one way to address this issue of lack of model trustworthiness by enabling the practitioner to know how much to trust a segmentation output. Current UQ methods in this application domain are mainly restricted to Bayesian based methods which are computationally expensive and are only able to extract central moments of uncertainty thereby limiting the quality of their uncertainty estimates. We present a simple framework for high-resolution predictive uncertainty quantification of semantic segmentation models that leverages a multi-moment functional definition of uncertainty associated with the model's feature space in the reproducing kernel Hilbert space (RKHS). The multiple uncertainty functionals extracted from this framework are defined by the local density dynamics of the model's feature space and hence automatically align themselves at the tail-regions of the intrinsic probability density function of the feature space (where uncertainty is the highest) in such a way that the successively higher order moments quantify the more uncertain regions. This leads to a significantly more accurate view of model uncertainty than conventional Bayesian methods. Moreover, the extraction of such moments is done in a single-shot computation making it much faster than Bayesian and ensemble approaches (that involve a high number of forward stochastic passes of the model to quantify its uncertainty). We demonstrate these advantages through experimental evaluations of our framework implemented over four different state-of-the-art model architectures that are trained and evaluated on two benchmark road-scene segmentation datasets (Camvid and Cityscapes).
Principle of Relevant Information for Graph Sparsification
May 31, 2022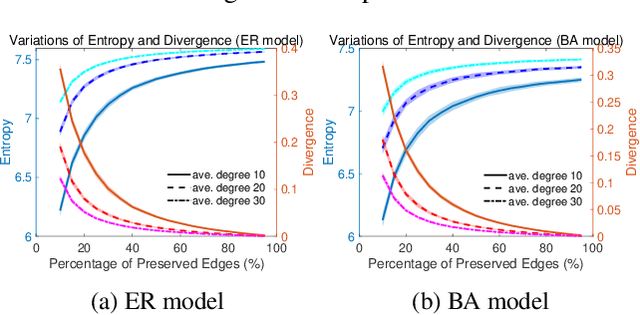
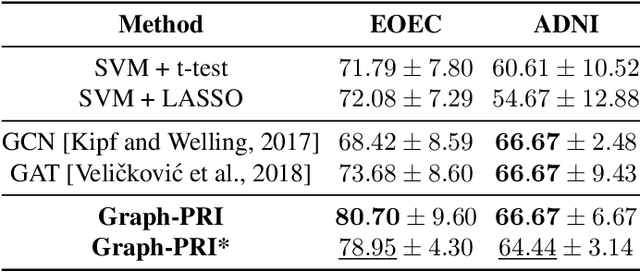
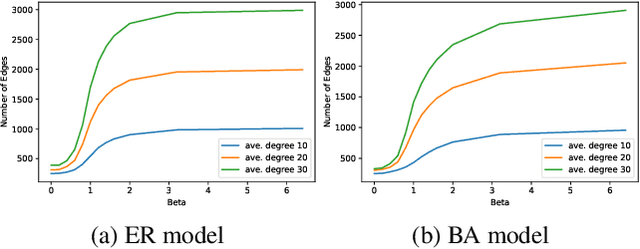
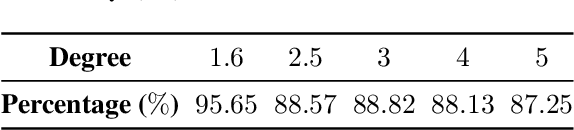
Graph sparsification aims to reduce the number of edges of a graph while maintaining its structural properties. In this paper, we propose the first general and effective information-theoretic formulation of graph sparsification, by taking inspiration from the Principle of Relevant Information (PRI). To this end, we extend the PRI from a standard scalar random variable setting to structured data (i.e., graphs). Our Graph-PRI objective is achieved by operating on the graph Laplacian, made possible by expressing the graph Laplacian of a subgraph in terms of a sparse edge selection vector $\mathbf{w}$. We provide both theoretical and empirical justifications on the validity of our Graph-PRI approach. We also analyze its analytical solutions in a few special cases. We finally present three representative real-world applications, namely graph sparsification, graph regularized multi-task learning, and medical imaging-derived brain network classification, to demonstrate the effectiveness, the versatility and the enhanced interpretability of our approach over prevalent sparsification techniques. Code of Graph-PRI is available at https://github.com/SJYuCNEL/PRI-Graphs
Deep Deterministic Independent Component Analysis for Hyperspectral Unmixing
Feb 15, 2022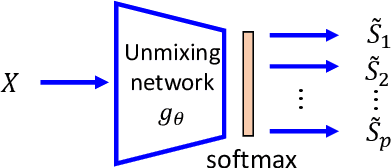
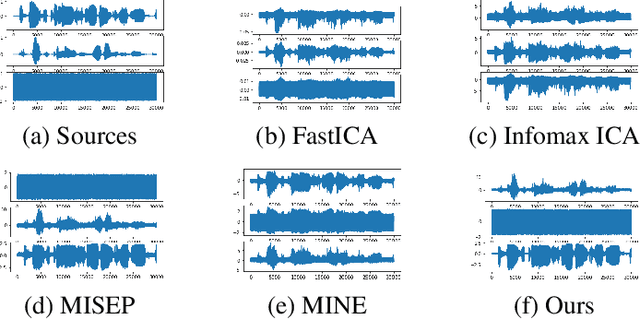
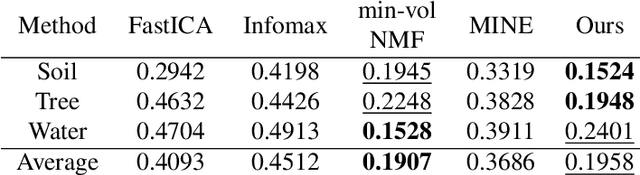
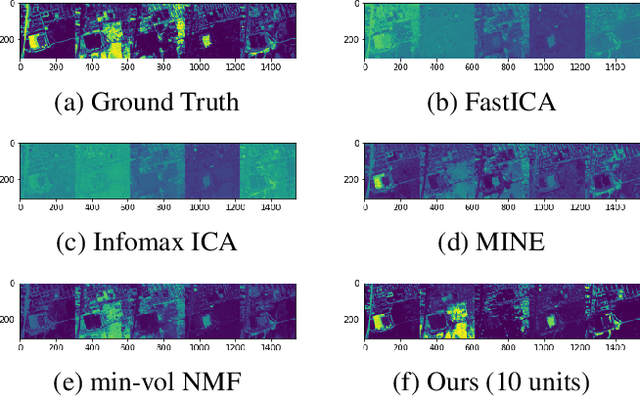
We develop a new neural network based independent component analysis (ICA) method by directly minimizing the dependence amongst all extracted components. Using the matrix-based R{\'e}nyi's $\alpha$-order entropy functional, our network can be directly optimized by stochastic gradient descent (SGD), without any variational approximation or adversarial training. As a solid application, we evaluate our ICA in the problem of hyperspectral unmixing (HU) and refute a statement that "\emph{ICA does not play a role in unmixing hyperspectral data}", which was initially suggested by \cite{nascimento2005does}. Code and additional remarks of our DDICA is available at https://github.com/hongmingli1995/DDICA.
Information Theoretic Structured Generative Modeling
Oct 12, 2021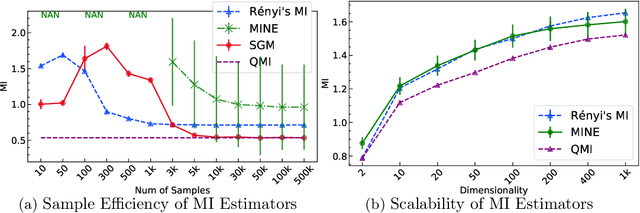
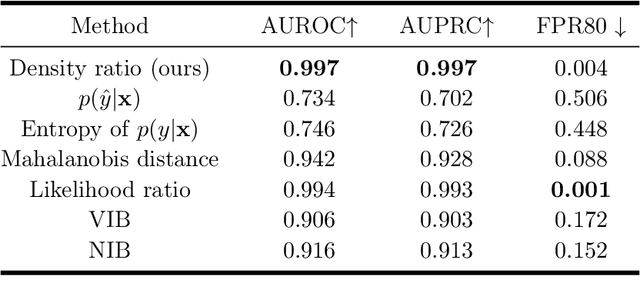
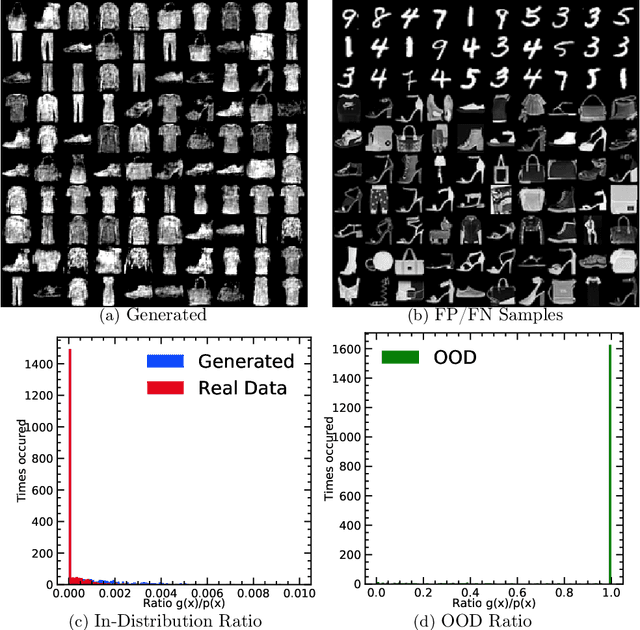
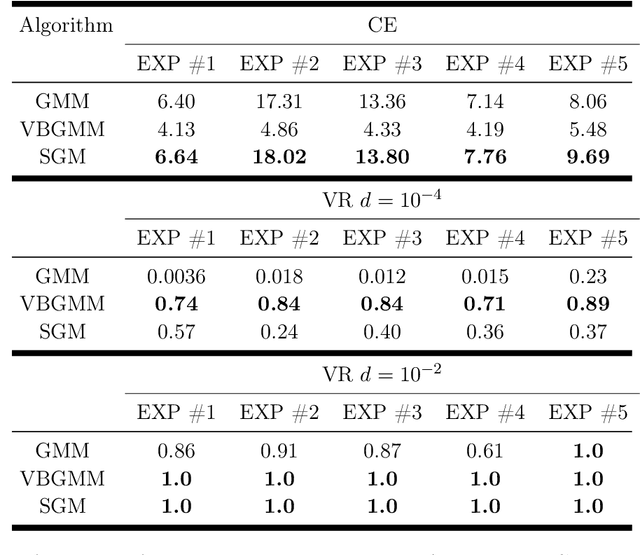
R\'enyi's information provides a theoretical foundation for tractable and data-efficient non-parametric density estimation, based on pair-wise evaluations in a reproducing kernel Hilbert space (RKHS). This paper extends this framework to parametric probabilistic modeling, motivated by the fact that R\'enyi's information can be estimated in closed-form for Gaussian mixtures. Based on this special connection, a novel generative model framework called the structured generative model (SGM) is proposed that makes straightforward optimization possible, because costs are scale-invariant, avoiding high gradient variance while imposing less restrictions on absolute continuity, which is a huge advantage in parametric information theoretic optimization. The implementation employs a single neural network driven by an orthonormal input appended to a single white noise source adapted to learn an infinite Gaussian mixture model (IMoG), which provides an empirically tractable model distribution in low dimensions. To train SGM, we provide three novel variational cost functions, based on R\'enyi's second-order entropy and divergence, to implement minimization of cross-entropy, minimization of variational representations of $f$-divergence, and maximization of the evidence lower bound (conditional probability). We test the framework for estimation of mutual information and compare the results with the mutual information neural estimation (MINE), for density estimation, for conditional probability estimation in Markov models as well as for training adversarial networks. Our preliminary results show that SGM significantly improves MINE estimation in terms of data efficiency and variance, conventional and variational Gaussian mixture models, as well as the performance of generative adversarial networks.
Estimating Rényi's $α$-Cross-Entropies in a Matrix-Based Way
Sep 24, 2021
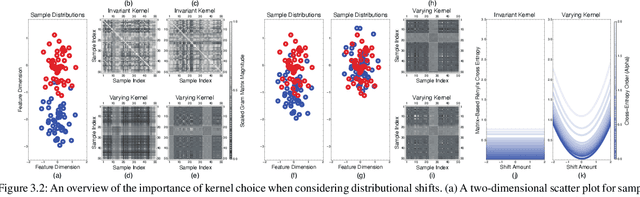
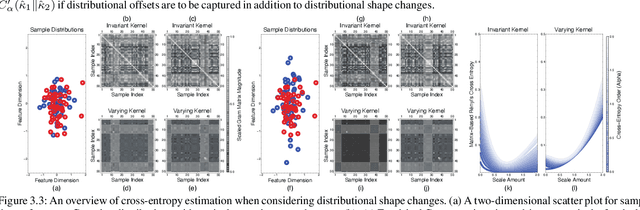
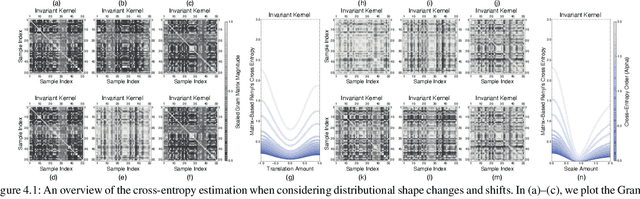
Conventional information-theoretic quantities assume access to probability distributions. Estimating such distributions is not trivial. Here, we consider function-based formulations of cross entropy that sidesteps this a priori estimation requirement. We propose three measures of R\'enyi's $\alpha$-cross-entropies in the setting of reproducing-kernel Hilbert spaces. Each measure has its appeals. We prove that we can estimate these measures in an unbiased, non-parametric, and minimax-optimal way. We do this via sample-constructed Gram matrices. This yields matrix-based estimators of R\'enyi's $\alpha$-cross-entropies. These estimators satisfy all of the axioms that R\'enyi established for divergences. Our cross-entropies can thus be used for assessing distributional differences. They are also appropriate for handling high-dimensional distributions, since the convergence rate of our estimator is independent of the sample dimensionality. Python code for implementing these measures can be found at https://github.com/isledge/MBRCE
Quantifying Model Predictive Uncertainty with Perturbation Theory
Sep 22, 2021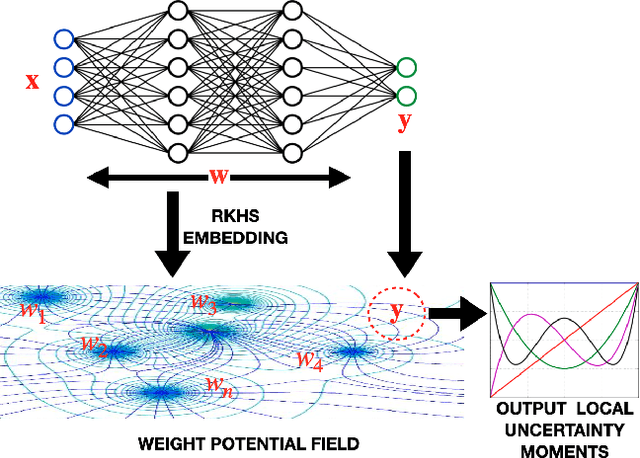
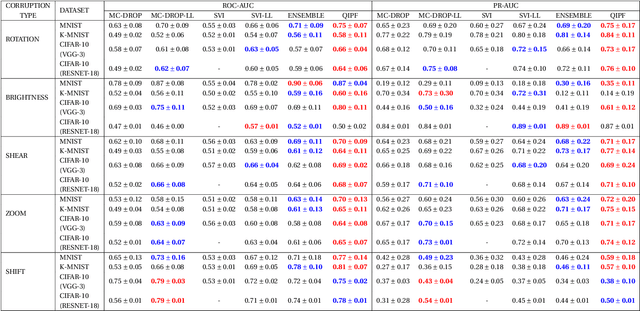
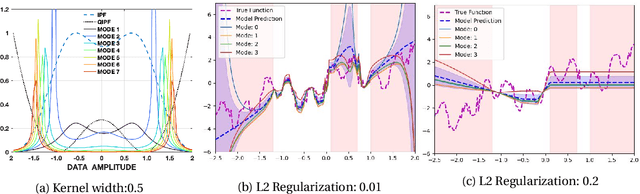
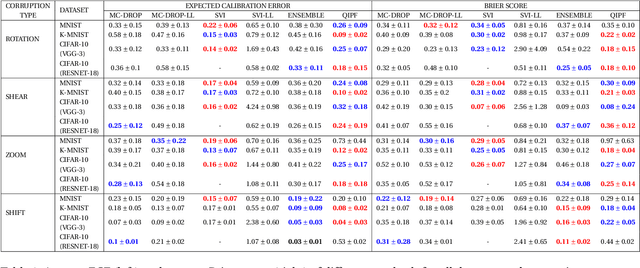
We propose a framework for predictive uncertainty quantification of a neural network that replaces the conventional Bayesian notion of weight probability density function (PDF) with a physics based potential field representation of the model weights in a Gaussian reproducing kernel Hilbert space (RKHS) embedding. This allows us to use perturbation theory from quantum physics to formulate a moment decomposition problem over the model weight-output relationship. The extracted moments reveal successive degrees of regularization of the weight potential field around the local neighborhood of the model output. Such localized moments represent well the PDF tails and provide significantly greater accuracy of the model's predictive uncertainty than the central moments characterized by Bayesian and ensemble methods or their variants. We show that this consequently leads to a better ability to detect false model predictions of test data that has undergone a covariate shift away from the training PDF learned by the model. We evaluate our approach against baseline uncertainty quantification methods on several benchmark datasets that are corrupted using common distortion techniques. Our approach provides fast model predictive uncertainty estimates with much greater precision and calibration.
Analysis of Intra-Operative Physiological Responses Through Complex Higher-Order SVD for Long-Term Post-Operative Pain Prediction
Sep 02, 2021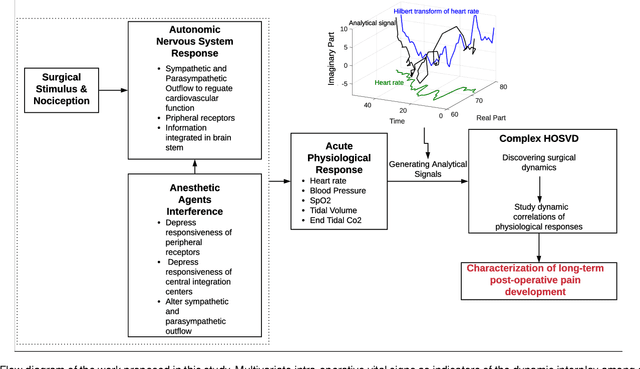
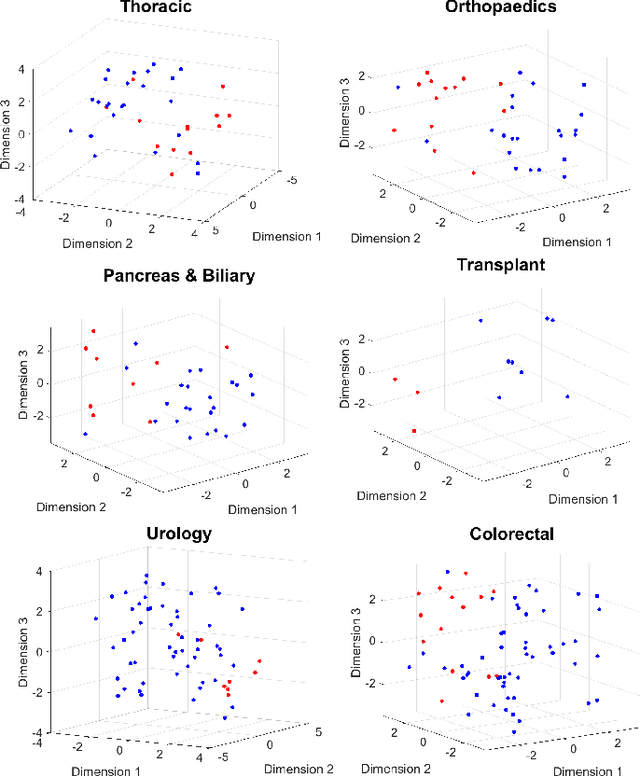
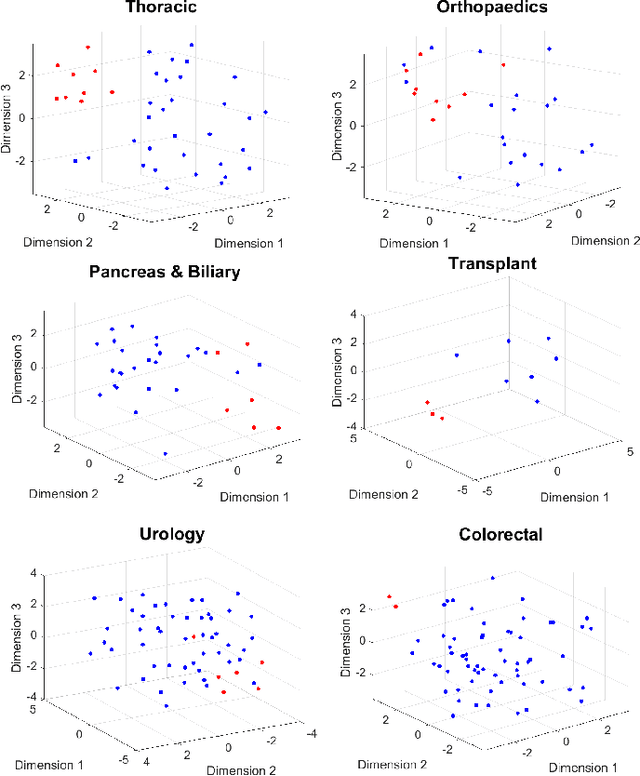
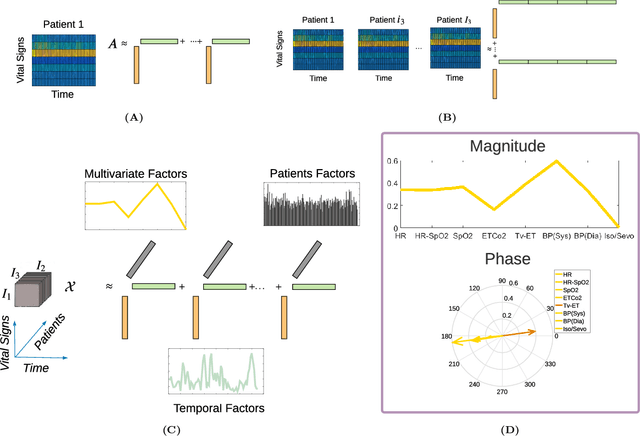
Long-term pain conditions after surgery and patients' responses to pain relief medications are not yet fully understood. While recent studies developed an index for nociception level of patients under general anesthesia, based on multiple physiological parameters, it remains unclear whether and how dynamics of these parameters indicate long-term post-operative pain (POP). To extract unbiased and interpretable descriptions of how physiological parameters dynamics change over time and across patients in response to surgical procedures, we employed a multivariate-temporal analysis. We demonstrate the main features of intra-operative physiological responses can be used to predict long-term POP. We propose to use a complex higher-order SVD method to accurately decompose the patients' physiological responses into multivariate structures evolving in time. We used intra-operative vital signs of 175 patients from a mixed surgical cohort to extract three interconnected, low-dimensional complex-valued descriptions of patients' physiological responses: multivariate factors, reflecting sub-physiological parameters; temporal factors reflecting common intra-surgery temporal dynamics; and patients factors, describing patient to patient changes in physiological responses. Adoption of complex-HOSVD allowed us to clarify the dynamic correlation structure included in intra-operative physiological responses. Instantaneous phases of the complex-valued physiological responses within the subspace of principal descriptors enabled us to discriminate between mild versus severe levels of long-term POP. By abstracting patients into different surgical groups, we identified significant surgery-related principal descriptors: each of them potentially encodes different surgical stimulation. The dynamics of patients' physiological responses to these surgical events are linked to long-term post-operative pain development.
External-Memory Networks for Low-Shot Learning of Targets in Forward-Looking-Sonar Imagery
Jul 22, 2021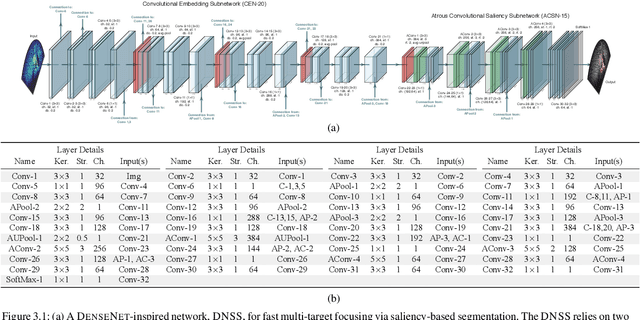
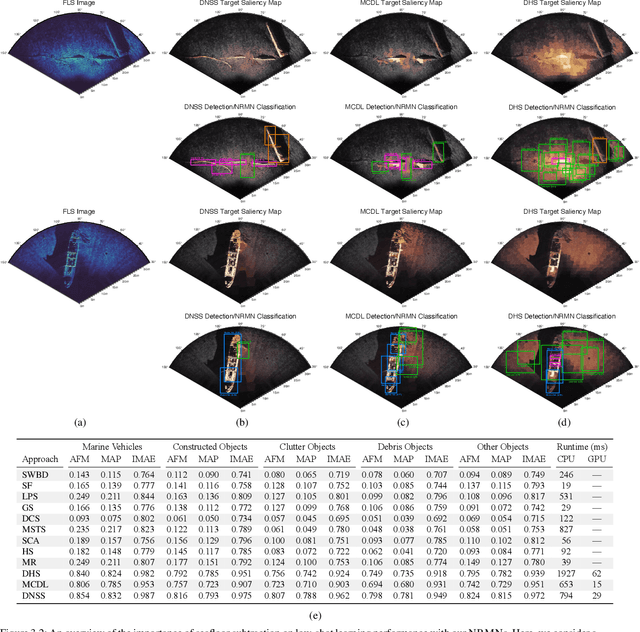
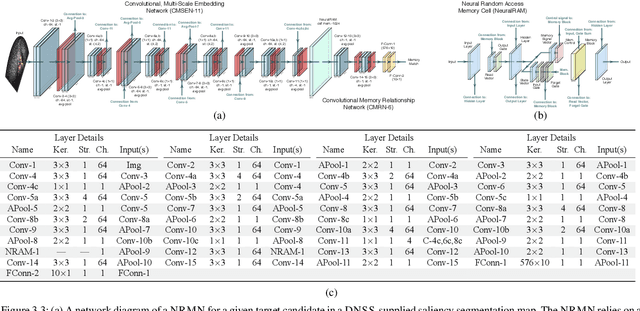
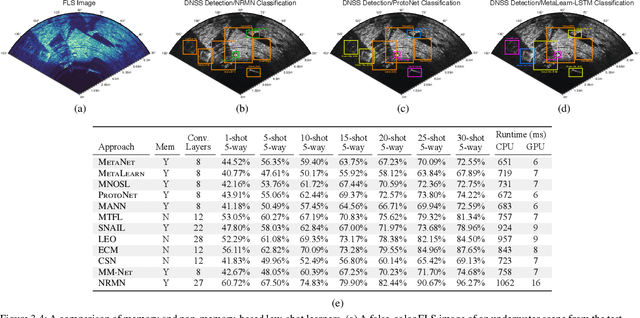
We propose a memory-based framework for real-time, data-efficient target analysis in forward-looking-sonar (FLS) imagery. Our framework relies on first removing non-discriminative details from the imagery using a small-scale DenseNet-inspired network. Doing so simplifies ensuing analyses and permits generalizing from few labeled examples. We then cascade the filtered imagery into a novel NeuralRAM-based convolutional matching network, NRMN, for low-shot target recognition. We employ a small-scale FlowNet, LFN to align and register FLS imagery across local temporal scales. LFN enables target label consensus voting across images and generally improves target detection and recognition rates. We evaluate our framework using real-world FLS imagery with multiple broad target classes that have high intra-class variability and rich sub-class structure. We show that few-shot learning, with anywhere from ten to thirty class-specific exemplars, performs similarly to supervised deep networks trained on hundreds of samples per class. Effective zero-shot learning is also possible. High performance is realized from the inductive-transfer properties of NRMNs when distractor elements are removed.