 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Skill Grounding via Code Refactoring with Small Language Models
Jun 06, 2026Effective skill grounding is essential for deploying reusable skills in embodied agents, as even minor embodiment or environmental differences can render an entire skill incompatible. This challenge is particularly pronounced in embodied settings, where agents must operate in dynamic, partially observable environments without access to large language models (LLMs). In this setting, reliance on LLMs is impractical, while small language models (sLMs) remain insufficient for the effective skill grounding required for reliable long-horizon control. We present RECENT, a refactoring-centric agent framework that enables efficient skill grounding with sLMs by decoupling skill semantics from embodiment- and environment-specific execution binding. By representing skills as executable code, RECENT preserves the semantic intent encoded in a skill's control structure while grounding it by modifying only execution bindings through localized refactoring, rather than regenerating code from scratch. We evaluate RECENT across diverse skill grounding scenarios spanning multiple robot embodiments in dynamic environments, demonstrating robust long-horizon performance when deployed with an sLM. Across all scenarios, RECENT achieves the best performance among sLM-based Code-as-Policies (CaP) methods and matches the task performance of LLM-based CaP.
Cross-Domain Demo-to-Code via Neurosymbolic Counterfactual Reasoning
Mar 19, 2026Recent advances in Vision-Language Models (VLMs) have enabled video-instructed robotic programming, allowing agents to interpret video demonstrations and generate executable control code. We formulate video-instructed robotic programming as a cross-domain adaptation problem, where perceptual and physical differences between demonstration and deployment induce procedural mismatches. However, current VLMs lack the procedural understanding needed to reformulate causal dependencies and achieve task-compatible behavior under such domain shifts. We introduce NeSyCR, a neurosymbolic counterfactual reasoning framework that enables verifiable adaptation of task procedures, providing a reliable synthesis of code policies. NeSyCR abstracts video demonstrations into symbolic trajectories that capture the underlying task procedure. Given deployment observations, it derives counterfactual states that reveal cross-domain incompatibilities. By exploring the symbolic state space with verifiable checks, NeSyCR proposes procedural revisions that restore compatibility with the demonstrated procedure. NeSyCR achieves a 31.14% improvement in task success over the strongest baseline Statler, showing robust cross-domain adaptation across both simulated and real-world manipulation tasks.
Rethinking Evaluation Metric for Probability Estimation Models Using Esports Data
Sep 12, 2023Probability estimation models play an important role in various fields, such as weather forecasting, recommendation systems, and sports analysis. Among several models estimating probabilities, it is difficult to evaluate which model gives reliable probabilities since the ground-truth probabilities are not available. The win probability estimation model for esports, which calculates the win probability under a certain game state, is also one of the fields being actively studied in probability estimation. However, most of the previous works evaluated their models using accuracy, a metric that only can measure the performance of discrimination. In this work, we firstly investigate the Brier score and the Expected Calibration Error (ECE) as a replacement of accuracy used as a performance evaluation metric for win probability estimation models in esports field. Based on the analysis, we propose a novel metric called Balance score which is a simple yet effective metric in terms of six good properties that probability estimation metric should have. Under the general condition, we also found that the Balance score can be an effective approximation of the true expected calibration error which has been imperfectly approximated by ECE using the binning technique. Extensive evaluations using simulation studies and real game snapshot data demonstrate the promising potential to adopt the proposed metric not only for the win probability estimation model for esports but also for evaluating general probability estimation models.
Embedded Real-Time Fall Detection Using Deep Learning For Elderly Care
Nov 30, 2017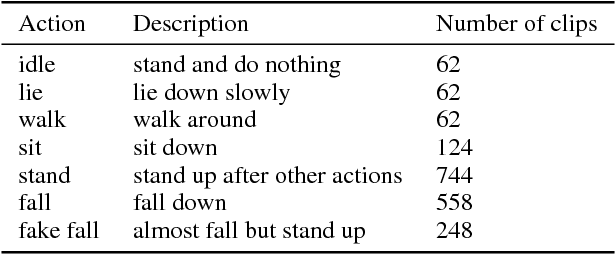
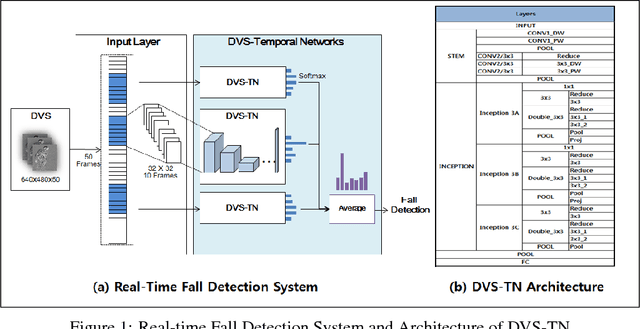
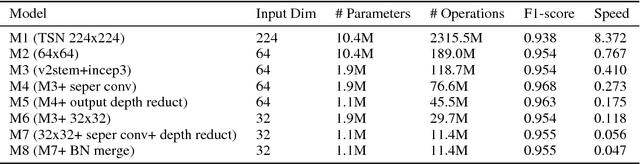
This paper proposes a real-time embedded fall detection system using a DVS(Dynamic Vision Sensor) that has never been used for traditional fall detection, a dataset for fall detection using that, and a DVS-TN(DVS-Temporal Network). The first contribution is building a DVS Falls Dataset, which made our network to recognize a much greater variety of falls than the existing datasets that existed before and solved privacy issues using the DVS. Secondly, we introduce the DVS-TN : optimized deep learning network to detect falls using DVS. Finally, we implemented a fall detection system which can run on low-computing H/W with real-time, and tested on DVS Falls Dataset that takes into account various falls situations. Our approach achieved 95.5% on the F1-score and operates at 31.25 FPS on NVIDIA Jetson TX1 board.