 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAgentic Trust Coordination for Federated Learning through Adaptive Thresholding and Autonomous Decision Making in Sustainable and Resilient Industrial Networks
Mar 26, 2026Distributed intelligence in industrial networks increasingly integrates sensing, communication, and computation across heterogeneous and resource constrained devices. Federated learning (FL) enables collaborative model training in such environments, but its reliability is affected by inconsistent client behaviour, noisy sensing conditions, and the presence of faulty or adversarial updates. Trust based mechanisms are commonly used to mitigate these effects, yet most remain statistical and heuristic, relying on fixed parameters or simple adaptive rules that struggle to accommodate changing operating conditions. This paper presents a lightweight agentic trust coordination approach for FL in sustainable and resilient industrial networks. The proposed Agentic Trust Control Layer operates as a server side control loop that observes trust related and system level signals, interprets their evolution over time, and applies targeted trust adjustments when instability is detected. The approach extends prior adaptive trust mechanisms by enabling context aware intervention decisions, rather than relying on fixed or purely reactive parameter updates. By explicitly separating observation, reasoning, and action, the proposed framework supports stable FL operation without modifying client side training or increasing communication overhead.
End-to-End 3D Hand Pose Estimation from Stereo Cameras
Jun 03, 2022
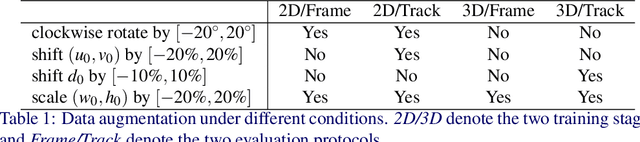
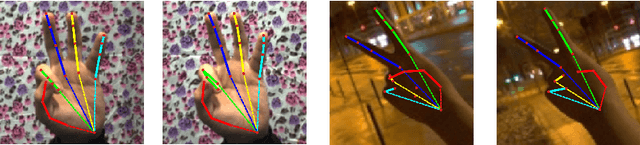
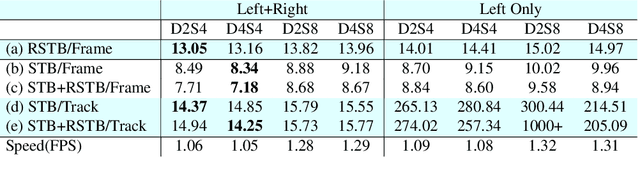
This work proposes an end-to-end approach to estimate full 3D hand pose from stereo cameras. Most existing methods of estimating hand pose from stereo cameras apply stereo matching to obtain depth map and use depth-based solution to estimate hand pose. In contrast, we propose to bypass the stereo matching and directly estimate the 3D hand pose from the stereo image pairs. The proposed neural network architecture extends from any keypoint predictor to estimate the sparse disparity of the hand joints. In order to effectively train the model, we propose a large scale synthetic dataset that is composed of stereo image pairs and ground truth 3D hand pose annotations. Experiments show that the proposed approach outperforms the existing methods based on the stereo depth.