 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobot-stated limitations but not intentions promote user assistance
Jun 08, 2016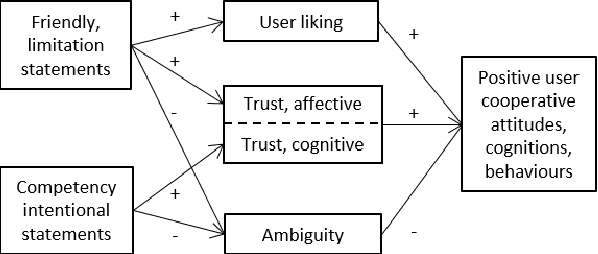
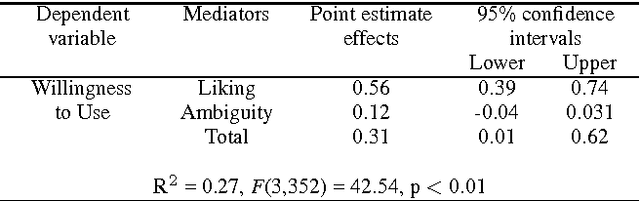
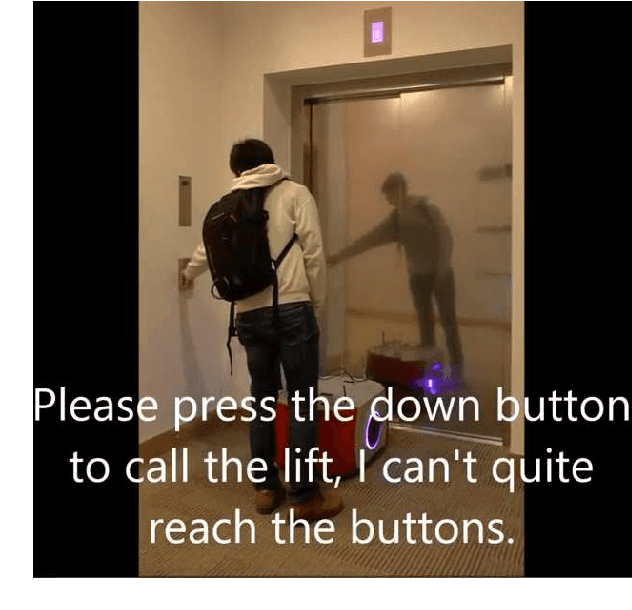
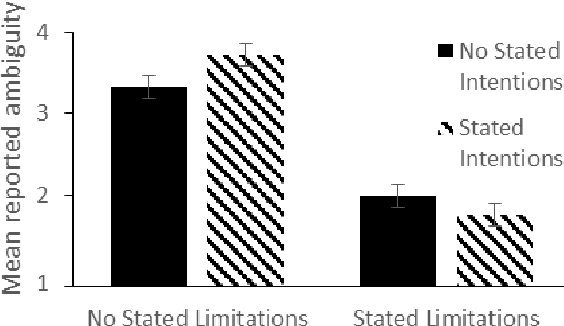
Human-Robot-Interaction (HRI) research is typically built around the premise that the robot serves to assist a human in achieving a human-led goal or shared task. However, there are many circumstances during HRI in which a robot may need the assistance of a human in shared tasks or to achieve goals. We use the ROBO-GUIDE model as a case study, and insights from social psychology, to examine how a robot's personality can impact on user cooperation. A study of 364 participants indicates that individuals may prefer to use likable social robots ahead of those designed to appear more capable; this outcome reflects known social decisions in human interpersonal relationships. This work further demonstrates the value of social psychology in developing social robots and exploring HRI.
Collision Avoidance of Two Autonomous Quadcopters
Mar 17, 2016

Traffic collision avoidance systems (TCAS) are used in order to avoid incidences of mid-air collisions between aircraft. We present a game-theoretic approach of a TCAS designed for autonomous unmanned aerial vehicles (UAVs). A variant of the canonical example of game-theoretic learning, fictitious play, is used as a coordination mechanism between the UAVs, that should choose between the alternative altitudes to fly and avoid collision. We present the implementation results of the proposed coordination mechanism in two quad-copters flying in opposite directions.