 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExpanding Versatility of Agile Locomotion through Policy Transitions Using Latent State Representation
Jun 14, 2023



This paper proposes the transition-net, a robust transition strategy that expands the versatility of robot locomotion in the real-world setting. To this end, we start by distributing the complexity of different gaits into dedicated locomotion policies applicable to real-world robots. Next, we expand the versatility of the robot by unifying the policies with robust transitions into a single coherent meta-controller by examining the latent state representations. Our approach enables the robot to iteratively expand its skill repertoire and robustly transition between any policy pair in a library. In our framework, adding new skills does not introduce any process that alters the previously learned skills. Moreover, training of a locomotion policy takes less than an hour with a single consumer GPU. Our approach is effective in the real-world and achieves a 19% higher average success rate for the most challenging transition pairs in our experiments compared to existing approaches.
Streamlined Framework for Agile Forecasting Model Development towards Efficient Inventory Management
Apr 13, 2023



This paper proposes a framework for developing forecasting models by streamlining the connections between core components of the developmental process. The proposed framework enables swift and robust integration of new datasets, experimentation on different algorithms, and selection of the best models. We start with the datasets of different issues and apply pre-processing steps to clean and engineer meaningful representations of time-series data. To identify robust training configurations, we introduce a novel mechanism of multiple cross-validation strategies. We apply different evaluation metrics to find the best-suited models for varying applications. One of the referent applications is our participation in the intelligent forecasting competition held by the United States Agency of International Development (USAID). Finally, we leverage the flexibility of the framework by applying different evaluation metrics to assess the performance of the models in inventory management settings.
Transition Motion Tensor: A Data-Driven Approach for Versatile and Controllable Agents in Physically Simulated Environments
Nov 30, 2021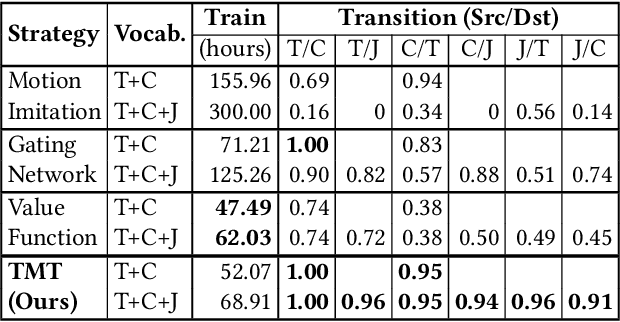
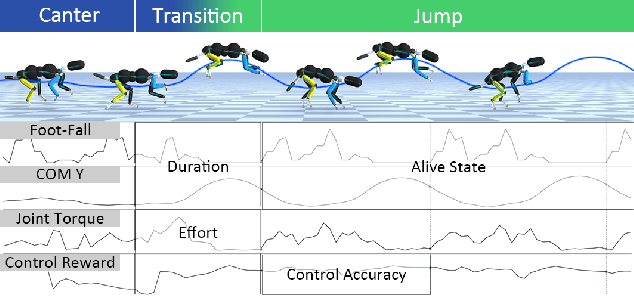
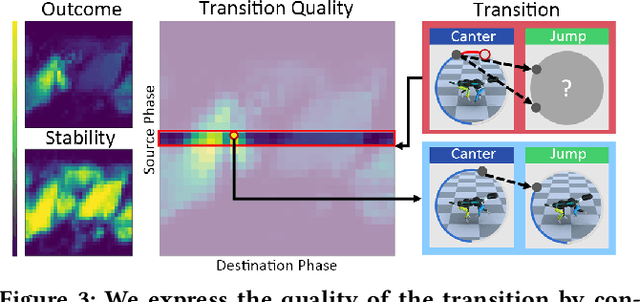
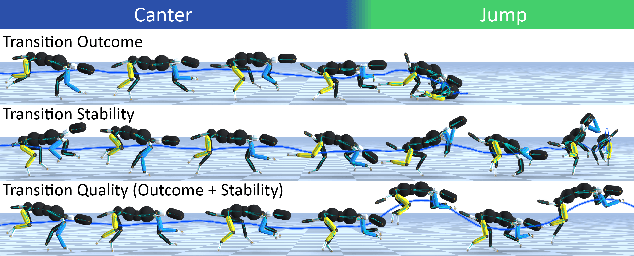
This paper proposes the Transition Motion Tensor, a data-driven framework that creates novel and physically accurate transitions outside of the motion dataset. It enables simulated characters to adopt new motion skills efficiently and robustly without modifying existing ones. Given several physically simulated controllers specializing in different motions, the tensor serves as a temporal guideline to transition between them. Through querying the tensor for transitions that best fit user-defined preferences, we can create a unified controller capable of producing novel transitions and solving complex tasks that may require multiple motions to work coherently. We apply our framework on both quadrupeds and bipeds, perform quantitative and qualitative evaluations on transition quality, and demonstrate its capability of tackling complex motion planning problems while following user control directives.
CARL: Controllable Agent with Reinforcement Learning for Quadruped Locomotion
May 11, 2020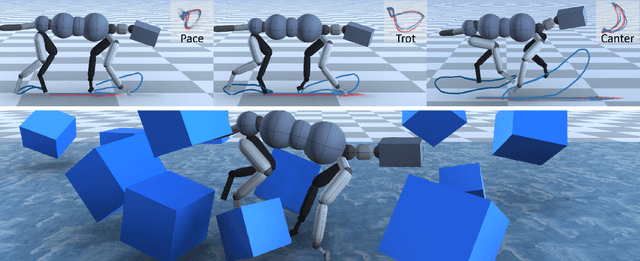
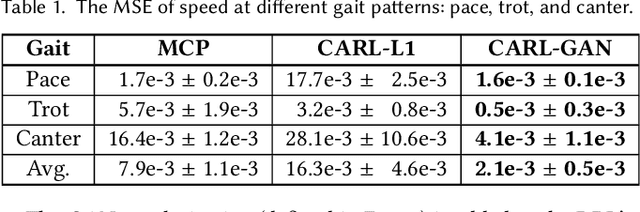
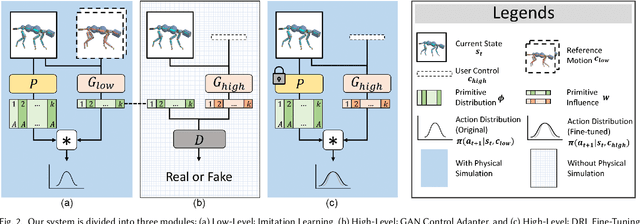
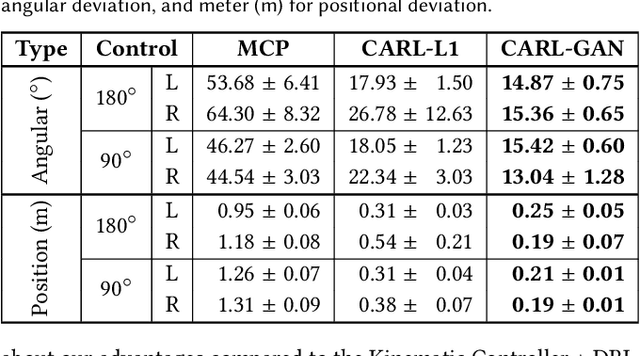
Motion synthesis in a dynamic environment has been a long-standing problem for character animation. Methods using motion capture data tend to scale poorly in complex environments because of their larger capturing and labeling requirement. Physics-based controllers are effective in this regard, albeit less controllable. In this paper, we present CARL, a quadruped agent that can be controlled with high-level directives and react naturally to dynamic environments. Starting with an agent that can imitate individual animation clips, we use Generative Adversarial Networks to adapt high-level controls, such as speed and heading, to action distributions that correspond to the original animations. Further fine-tuning through the deep reinforcement learning enables the agent to recover from unseen external perturbations while producing smooth transitions. It then becomes straightforward to create autonomous agents in dynamic environments by adding navigation modules over the entire process. We evaluate our approach by measuring the agent's ability to follow user control and provide a visual analysis of the generated motion to show its effectiveness.