 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDevelopment of Low-Cost and Bidirectional Syringe Pumps for Soft Robotics Applications
Mar 17, 2026Soft robotics leverages deformable materials to develop robots capable of navigating unstructured and dynamic environments. Silicone Voxel-Based Soft Robots (Silibots) are a type of pneumatically actuated soft robots that rely on the inflation and deflation of their voxels for shape-shifting behaviors. However, traditional pneumatic actuation methods (high pressure solenoids, medical diaphragm pumps, micro compressors, compressed fluid) pose significant challenges due to their limited efficacy, cost, complexity, or lack of precision. This work introduces a low cost and modular syringe pump system, constructed with off the shelf and 3D printed parts, designed to overcome these limitations. The syringe pump system also enhances actuation with the unique ability to pull a vacuum as well pump air into the soft robot. Furthermore, the syringe pump features modular hardware and customizable software, allowing for researchers to tailor the syringe pump to their requirements or operate multiple pumps simultaneously with unique pump parameters. This flexibility makes the syringe pump an accessible and scalable tool that paves the way for broader adoption of soft robotic technologies in research and education.
Walk the Robot: Exploring Soft Robotic Morphological Communication driven by Spiking Neural Networks
Aug 27, 2025



Recently, researchers have explored control methods that embrace nonlinear dynamic coupling instead of suppressing it. Such designs leverage dynamical coupling for communication between different parts of the robot. Morphological communication refers to when those dynamics can be used as an emergent data bus to facilitate coordination among independent controller modules within the same robot. Previous research with tensegrity-based robot designs has shown that evolutionary learning models that evolve spiking neural networks (SNN) as robot control mechanisms are effective for controlling non-rigid robots. Our own research explores the emergence of morphological communication in an SNN-based simulated soft robot in theEvoGym environment.
Robustness for Free: Quality-Diversity Driven Discovery of Agile Soft Robotic Gaits
Nov 02, 2023



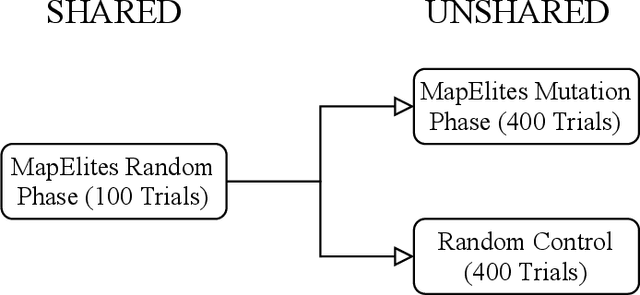
Soft robotics aims to develop robots able to adapt their behavior across a wide range of unstructured and unknown environments. A critical challenge of soft robotic control is that nonlinear dynamics often result in complex behaviors hard to model and predict. Typically behaviors for mobile soft robots are discovered through empirical trial and error and hand-tuning. More recently, optimization algorithms such as Genetic Algorithms (GA) have been used to discover gaits, but these behaviors are often optimized for a single environment or terrain, and can be brittle to unplanned changes to terrain. In this paper we demonstrate how Quality Diversity Algorithms, which search of a range of high-performing behaviors, can produce repertoires of gaits that are robust to changing terrains. This robustness significantly out-performs that of gaits produced by a single objective optimization algorithm.
Behavioral Repertoires for Soft Tensegrity Robots
Sep 23, 2020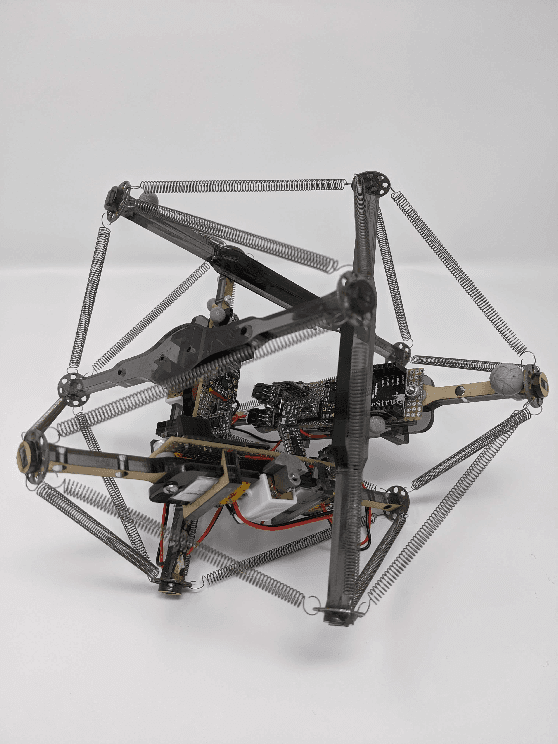
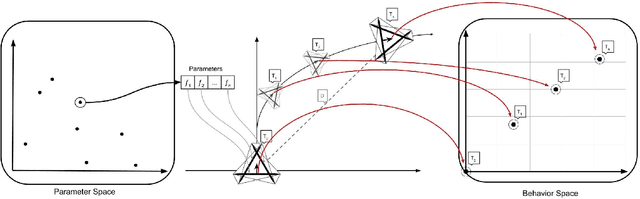
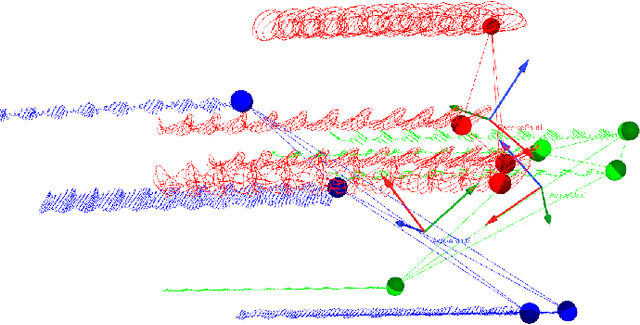
Mobile soft robots offer compelling applications in fields ranging from urban search and rescue to planetary exploration. A critical challenge of soft robotic control is that the nonlinear dynamics imposed by soft materials often result in complex behaviors that are counterintuitive and hard to model or predict. As a consequence, most behaviors for mobile soft robots are discovered through empirical trial and error and hand-tuning. A second challenge is that soft materials are difficult to simulate with high fidelity -- leading to a significant reality gap when trying to discover or optimize new behaviors. In this work we employ a Quality Diversity Algorithm running model-free on a physical soft tensegrity robot that autonomously generates a behavioral repertoire with no a priori knowledge of the robot dynamics, and minimal human intervention. The resulting behavior repertoire displays a diversity of unique locomotive gaits useful for a variety of tasks. These results help provide a road map for increasing the behavioral capabilities of mobile soft robots through real-world automation.
Adaptive and Resilient Soft Tensegrity Robots
Feb 19, 2018



Living organisms intertwine soft (e.g., muscle) and hard (e.g., bones) materials, giving them an intrinsic flexibility and resiliency often lacking in conventional rigid robots. The emerging field of soft robotics seeks to harness these same properties in order to create resilient machines. The nature of soft materials, however, presents considerable challenges to aspects of design, construction, and control -- and up until now, the vast majority of gaits for soft robots have been hand-designed through empirical trial-and-error. This manuscript describes an easy-to-assemble tensegrity-based soft robot capable of highly dynamic locomotive gaits and demonstrating structural and behavioral resilience in the face of physical damage. Enabling this is the use of a machine learning algorithm able to discover effective gaits with a minimal number of physical trials. These results lend further credence to soft-robotic approaches that seek to harness the interaction of complex material dynamics in order to generate a wealth of dynamical behaviors.