 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRemoving Planner Bias in Goal Recognition Through Multi-Plan Dataset Generation
Feb 16, 2026Autonomous agents require some form of goal and plan recognition to interact in multiagent settings. Unfortunately, all existing goal recognition datasets suffer from a systematical bias induced by the planning systems that generated them, namely heuristic-based forward search. This means that existing datasets lack enough challenge for more realistic scenarios (e.g., agents using different planners), which impacts the evaluation of goal recognisers with respect to using different planners for the same goal. In this paper, we propose a new method that uses top-k planning to generate multiple, different, plans for the same goal hypothesis, yielding benchmarks that mitigate the bias found in the current dataset. This allows us to introduce a new metric called Version Coverage Score (VCS) to measure the resilience of the goal recogniser when inferring a goal based on different sets of plans. Our results show that the resilience of the current state-of-the-art goal recogniser degrades substantially under low observability settings.
From Stories to Cities to Games: A Qualitative Evaluation of Behaviour Planning
Jan 08, 2026The primary objective of a diverse planning approach is to generate a set of plans that are distinct from one another. Such an approach is applied in a variety of real-world domains, including risk management, automated stream data analysis, and malware detection. More recently, a novel diverse planning paradigm, referred to as behaviour planning, has been proposed. This approach extends earlier methods by explicitly incorporating a diversity model into the planning process and supporting multiple planning categories. In this paper, we demonstrate the usefulness of behaviour planning in real-world settings by presenting three case studies. The first case study focuses on storytelling, the second addresses urban planning, and the third examines game evaluation.
Behaviour Planning: A Toolkit for Diverse Planning
May 07, 2024Diverse planning is the problem of generating plans with distinct characteristics. This is valuable for many real-world scenarios, including applications related to plan recognition and business process automation. In this work, we introduce \emph{Behaviour Planning}, a diverse planning toolkit that can characterise and generate diverse plans based on modular diversity models. We present a qualitative framework for describing diversity models, a planning approach for generating plans aligned with any given diversity model, and provide a practical implementation of an SMT-based behaviour planner. We showcase how the qualitative approach offered by Behaviour Planning allows it to overcome various challenges faced by previous approaches. Finally, the experimental evaluation shows the effectiveness of Behaviour Planning in generating diverse plans compared to state-of-the-art approaches.
On Grid Graph Reachability and Puzzle Games
Oct 02, 2023Many puzzle video games, like Sokoban, involve moving some agent in a maze. The reachable locations are usually apparent for a human player, and the difficulty of the game is mainly related to performing actions on objects, such as pushing (reachable) boxes. For this reason, the difficulty of a particular level is often measured as the number of actions on objects, other than agent walking, needed to find a solution. In this paper we study CP and SAT approaches for solving these kind of problems. We review some reachability encodings and propose a new one. We empirically show that the new encoding is well-suited for solving puzzle problems in the planning as SAT paradigm, especially when considering the execution of several actions in parallel.
Challenges in Modelling and Solving Plotting with PDDL
Oct 02, 2023


We study a planning problem based on Plotting, a tile-matching puzzle video game published by Taito in 1989. The objective of this game is to remove a target number of coloured blocks from a grid by sequentially shooting blocks into the grid. Plotting features complex transitions after every shot: various blocks are affected directly, while others can be indirectly affected by gravity. We highlight the challenges of modelling Plotting with PDDL and of solving it with a grounding-based state-of-the-art planner.
Towards Automatic Design of Factorio Blueprints
Oct 02, 2023Factorio is a 2D construction and management simulation video game about building automated factories to produce items of increasing complexity. A core feature of the game is its blueprint system, which allows players to easily save and replicate parts of their designs. Blueprints can reproduce any layout of objects in the game, but are typically used to encapsulate a complex behaviour, such as the production of a non-basic object. Once created, these blueprints are then used as basic building blocks, allowing the player to create a layer of abstraction. The usage of blueprints not only eases the expansion of the factory but also allows the sharing of designs with the game's community. The layout in a blueprint can be optimised using various criteria, such as the total space used or the final production throughput. The design of an optimal blueprint is a hard combinatorial problem, interleaving elements of many well-studied problems such as bin-packing, routing or network design. This work presents a new challenging problem and explores the feasibility of a constraint model to optimise Factorio blueprints, balancing correctness, optimality, and performance.
Towards a Model of Puzznic
Oct 02, 2023We report on progress in modelling and solving Puzznic, a video game requiring the player to plan sequences of moves to clear a grid by matching blocks. We focus here on levels with no moving blocks. We compare a planning approach and three constraint programming approaches on a small set of benchmark instances. The planning approach is at present superior to the constraint programming approaches, but we outline proposals for improving the constraint models.
A Good Snowman is Hard to Plan
Oct 02, 2023In this work we face a challenging puzzle video game: A Good Snowman is Hard to Build. The objective of the game is to build snowmen by moving and stacking snowballs on a discrete grid. For the sake of player engagement with the game, it is interesting to avoid that a player finds a much easier solution than the one the designer expected. Therefore, having tools that are able to certify the optimality of solutions is crucial. Although the game can be stated as a planning problem and can be naturally modelled in PDDL, we show that a direct translation to SAT clearly outperforms off-the-shelf state-of-the-art planners. As we show, this is mainly due to the fact that reachability properties can be easily modelled in SAT, allowing for shorter plans, whereas using axioms to express a reachability derived predicate in PDDL does not result in any significant reduction of solving time with the considered planners. We deal with a set of 51 levels, both original and crafted, solving 43 and with 8 challenging instances still remaining to be solved.
Bridging the Gap between Structural and Semantic Similarity in Diverse Planning
Oct 02, 2023



Diverse planning is the problem of finding multiple plans for a given problem specification, which is at the core of many real-world applications. For example, diverse planning is a critical piece for the efficiency of plan recognition systems when dealing with noisy and missing observations. Providing diverse solutions can also benefit situations where constraints are too expensive or impossible to model. Current diverse planners operate by generating multiple plans and then applying a selection procedure to extract diverse solutions using a similarity metric. Generally, current similarity metrics only consider the structural properties of the given plans. We argue that this approach is a limitation that sometimes prevents such metrics from capturing why two plans differ. In this work, we propose two new domain-independent metrics which are able to capture relevant information on the difference between two given plans from a domain-dependent viewpoint. We showcase their utility in various situations where the currently used metrics fail to capture the similarity between plans, failing to capture some structural symmetries.
A Framework for Generating Informative Benchmark Instances
May 29, 2022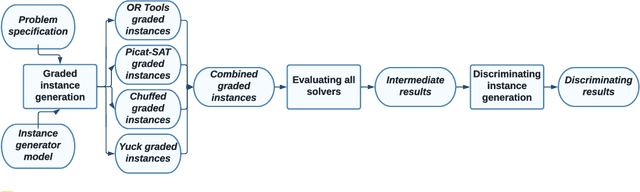
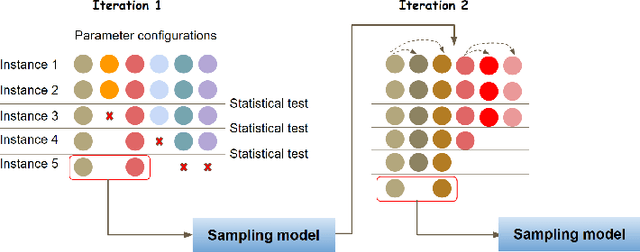
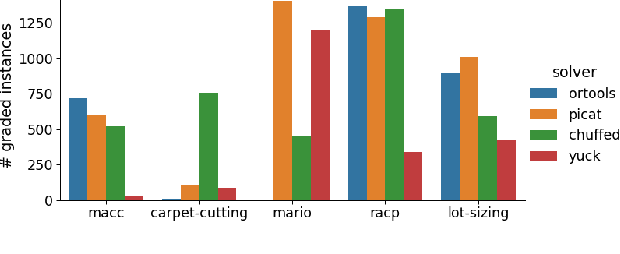
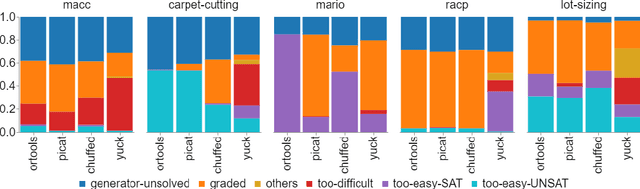
Benchmarking is an important tool for assessing the relative performance of alternative solving approaches. However, the utility of benchmarking is limited by the quantity and quality of the available problem instances. Modern constraint programming languages typically allow the specification of a class-level model that is parameterised over instance data. This separation presents an opportunity for automated approaches to generate instance data that define instances that are graded (solvable at a certain difficulty level for a solver) or can discriminate between two solving approaches. In this paper, we introduce a framework that combines these two properties to generate a large number of benchmark instances, purposely generated for effective and informative benchmarking. We use five problems that were used in the MiniZinc competition to demonstrate the usage of our framework. In addition to producing a ranking among solvers, our framework gives a broader understanding of the behaviour of each solver for the whole instance space; for example by finding subsets of instances where the solver performance significantly varies from its average performance.