 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHeterogeneous AAV Logistics Task Allocation: A Reinforcement Learning Enhanced Overlapping Coalition Formation Game Approach
May 26, 2026In dynamic urban logistics, the stochastic emergence of time-sensitive tasks poses a significant optimality challenge for heterogeneous AAVs logistics task allocation. To address this problem, a reinforcement learning enhanced overlapping coalition formation game approach is proposed. A dynamic task allocation model is established, where global optimality is mathematically quantified by a generalized logistics cost coupling service quality and resource consumption. To deal with the time-varying task sets induced by stochastic order arrivals, a transformer-based soft actor-critic network is designed. By leveraging multi-head self-attention to encode variable-length logistics states and capture task-wise spatiotemporal dependencies, the learned policy adaptively guides coalition updates, replacing heuristic rules in the overlapping coalition formation game. On this basis, heterogeneous AAVs can form more efficient overlapping coalitions for dynamic logistics tasks. The resulting coalition formation process is proven to constitute an exact potential game, which guarantees convergence to a Nash-stable equilibrium within a finite number of iterations. Numerical simulations demonstrate that the proposed algorithm effectively improves the optimality of task allocation under the generalized logistics cost criterion. In a scenario with 32 AAVs and 80 tasks, our algorithm achieves a 39.76% cost reduction compared with the heuristic OCF baseline. Indoor flight experiments further validate its practicality.
TRUST-Planner: Topology-guided Robust Trajectory Planner for AAVs with Uncertain Obstacle Spatial-temporal Avoidance
Aug 20, 2025



Despite extensive developments in motion planning of autonomous aerial vehicles (AAVs), existing frameworks faces the challenges of local minima and deadlock in complex dynamic environments, leading to increased collision risks. To address these challenges, we present TRUST-Planner, a topology-guided hierarchical planning framework for robust spatial-temporal obstacle avoidance. In the frontend, a dynamic enhanced visible probabilistic roadmap (DEV-PRM) is proposed to rapidly explore topological paths for global guidance. The backend utilizes a uniform terminal-free minimum control polynomial (UTF-MINCO) and dynamic distance field (DDF) to enable efficient predictive obstacle avoidance and fast parallel computation. Furthermore, an incremental multi-branch trajectory management framework is introduced to enable spatio-temporal topological decision-making, while efficiently leveraging historical information to reduce replanning time. Simulation results show that TRUST-Planner outperforms baseline competitors, achieving a 96\% success rate and millisecond-level computation efficiency in tested complex environments. Real-world experiments further validate the feasibility and practicality of the proposed method.
Compatible Learning for Deep Photonic Neural Network
Mar 14, 2020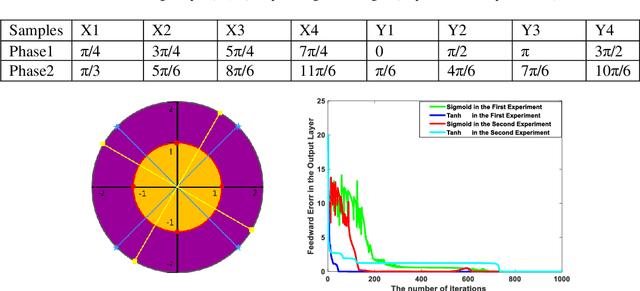
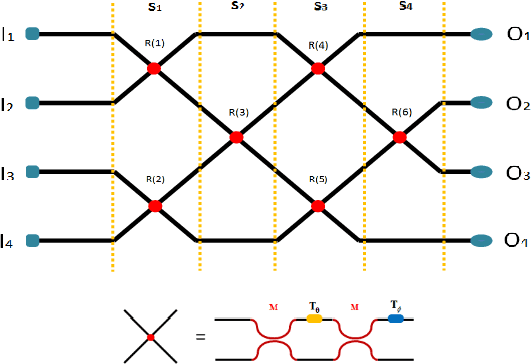
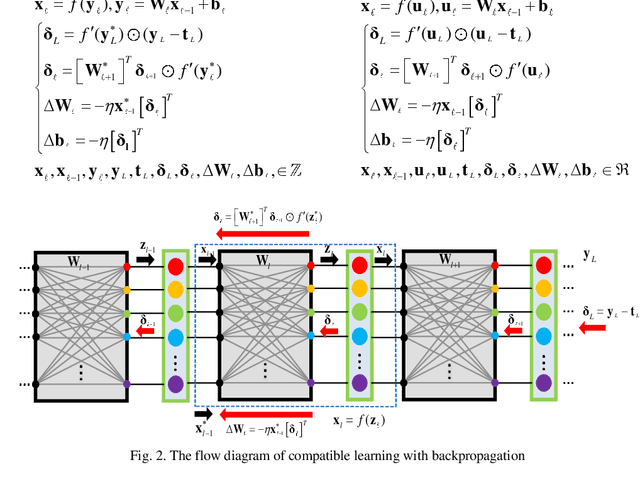
Realization of deep learning with coherent optical field has attracted remarkably attentions presently, which benefits on the fact that optical matrix manipulation can be executed at speed of light with inherent parallel computation as well as low latency. Photonic neural network has a significant potential for prediction-oriented tasks. Yet, real-value Backpropagation behaves somewhat intractably for coherent photonic intelligent training. We develop a compatible learning protocol in complex space, of which nonlinear activation could be selected efficiently depending on the unveiled compatible condition. Compatibility indicates that matrix representation in complex space covers its real counterpart, which could enable a single channel mingled training in real and complex space as a unified model. The phase logical XOR gate with Mach-Zehnder interferometers and diffractive neural network with optical modulation mechanism, implementing intelligent weight learned from compatible learning, are presented to prove the availability. Compatible learning opens an envisaged window for deep photonic neural network.