 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScalable Asynchronous Federated Modeling for Spatial Data
Oct 02, 2025Spatial data are central to applications such as environmental monitoring and urban planning, but are often distributed across devices where privacy and communication constraints limit direct sharing. Federated modeling offers a practical solution that preserves data privacy while enabling global modeling across distributed data sources. For instance, environmental sensor networks are privacy- and bandwidth-constrained, motivating federated spatial modeling that shares only privacy-preserving summaries to produce timely, high-resolution pollution maps without centralizing raw data. However, existing federated modeling approaches either ignore spatial dependence or rely on synchronous updates that suffer from stragglers in heterogeneous environments. This work proposes an asynchronous federated modeling framework for spatial data based on low-rank Gaussian process approximations. The method employs block-wise optimization and introduces strategies for gradient correction, adaptive aggregation, and stabilized updates. We establish linear convergence with explicit dependence on staleness, a result of standalone theoretical significance. Moreover, numerical experiments demonstrate that the asynchronous algorithm achieves synchronous performance under balanced resource allocation and significantly outperforms it in heterogeneous settings, showcasing superior robustness and scalability.
Reinforcement Learning Approach to Clear Paths of Robots in Elevator Environment
Mar 18, 2022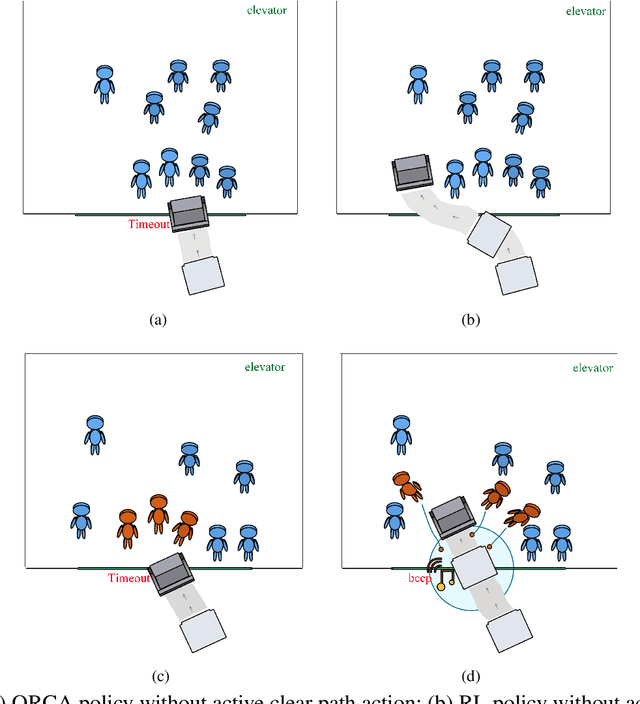
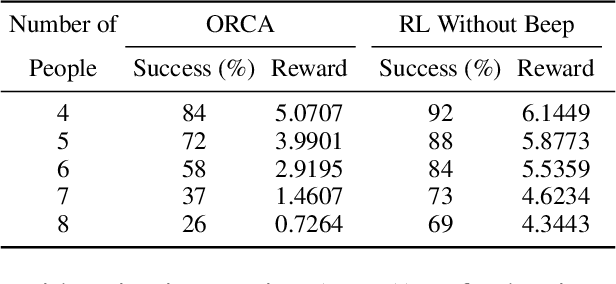
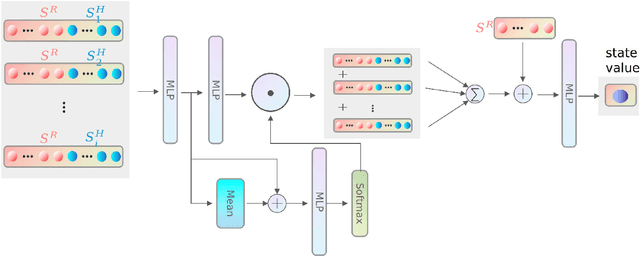
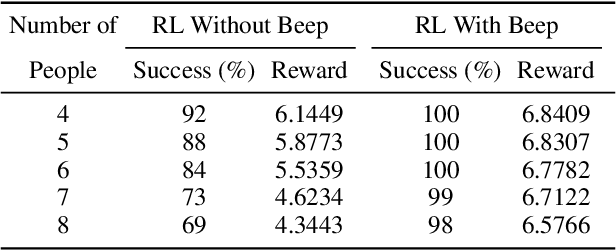
Efficiently using the space of an elevator for a service robot is very necessary, due to the need for reducing the amount of time caused by waiting for the next elevator. To solve this, we propose a hybrid approach that combines reinforcement learning (RL) with voice interaction for robot navigation in the scene of entering the elevator. RL provides robots with a high exploration ability to find a new clear path to enter the elevator compared to the traditional navigation methods such as Optimal Reciprocal Collision Avoidance (ORCA). The proposed method allows the robot to take an active clear path action towards the elevator whilst a crowd of people stands at the entrance of the elevator wherein there are still lots of space. This is done by embedding a clear path action (beep) into the RL framework, and the proposed navigation policy leads the robot to finish tasks efficiently and safely. Our model approach provides a great improvement in the success rate and reward of entering the elevator compared to state-of-the-art ORCA and RL navigation policy without beep.