 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning-based Measurement Scheduling for Loosely-Coupled Cooperative Localization
Dec 06, 2021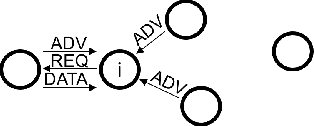
In cooperative localization, communicating mobile agents use inter-agent relative measurements to improve their dead-reckoning-based global localization. Measurement scheduling enables an agent to decide which subset of available inter-agent relative measurements it should process when its computational resources are limited. Optimal measurement scheduling is an NP-hard combinatorial optimization problem. The so-called sequential greedy (SG) algorithm is a popular suboptimal polynomial-time solution for this problem. However, the merit function evaluation for the SG algorithms requires access to the state estimate vector and error covariance matrix of all the landmark agents (teammates that an agent can take measurements from). This paper proposes a measurement scheduling for CL that follows the SG approach but reduces the communication and computation cost by using a neural network-based surrogate model as a proxy for the SG algorithm's merit function. The significance of this model is that it is driven by local information and only a scalar metadata from the landmark agents. This solution addresses the time and memory complexity issues of running the SG algorithm in three ways: (a) reducing the inter-agent communication message size, (b) decreasing the complexity of function evaluations by using a simpler surrogate (proxy) function, (c) reducing the required memory size.Simulations demonstrate our results.
An IMM-based Decentralized Cooperative Localization with LoS and NLoS UWB Inter-agent Ranging
Sep 11, 2020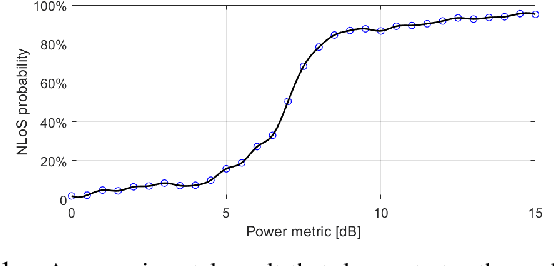
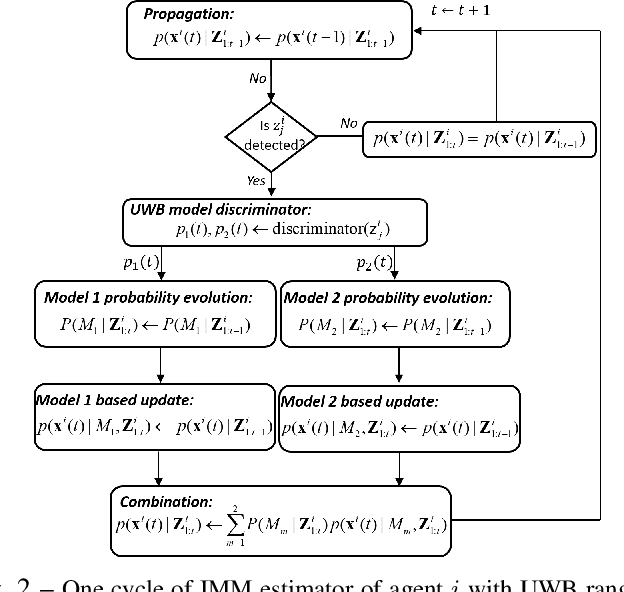
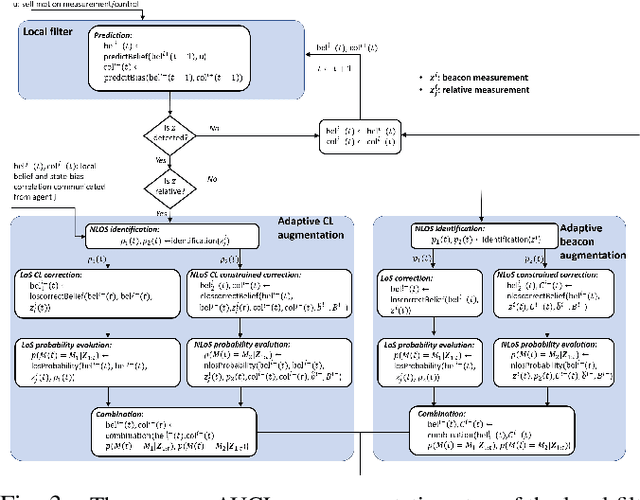
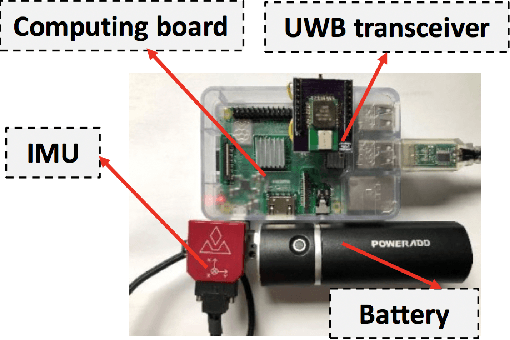
This paper studies the global localization of a group of communicating mobile agents via an ultra-wideband (UWB) inter-agent ranging aided dead-reckoning system. We propose a loosely coupled cooperative localization algorithm that acts as an augmentation atop the local dead-reckoning system of each mobile agent. This augmentation becomes active only when an agent wants to process a relative measurement it has taken. The main contribution of this paper is to address the challenges in the proper processing of the UWB range measurements in the framework of the proposed cooperative localization. Even though UWB offers a decimeter level accuracy in line-of-sight (LoS) ranging, its accuracy degrades significantly in non-line-of-sight (NLoS) due to the significant unknown positive bias in the measurements. Thus, the measurement models for the UWB LoS and NLoS ranging conditions are different, and proper processing of NLoS measurements requires a bias compensation measure. On the other hand, in practice, the measurement modal discriminators determine the type of UWB range measurements with only some level of certainty. To take into account the probabilistic nature of the NLoS identifiers, our proposed cooperative localization employs an interacting multiple model (IMM) estimator. The effectiveness of our proposed method is demonstrated via an experiment for a group of pedestrians who use UWB relative range measurements among themselves to improve their geolocation using a shoe-mounted INS system.
Cooperative Localization under Limited Connectivity
Apr 30, 2019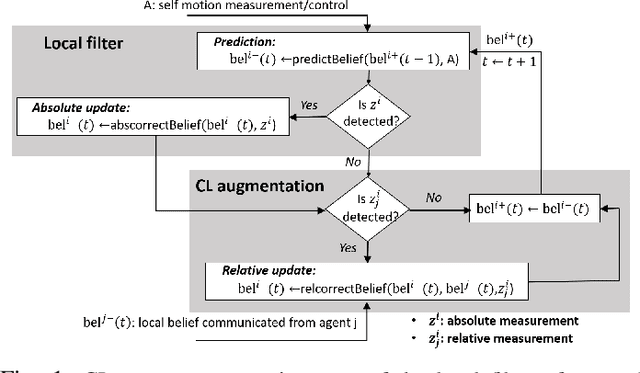
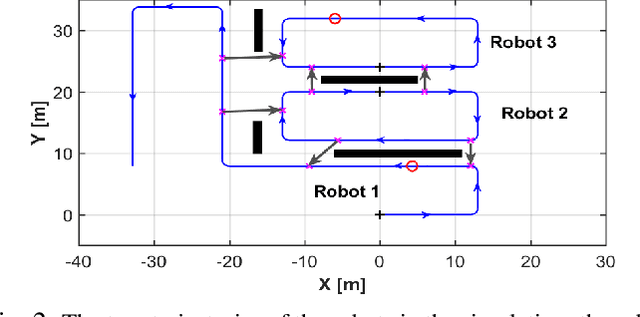
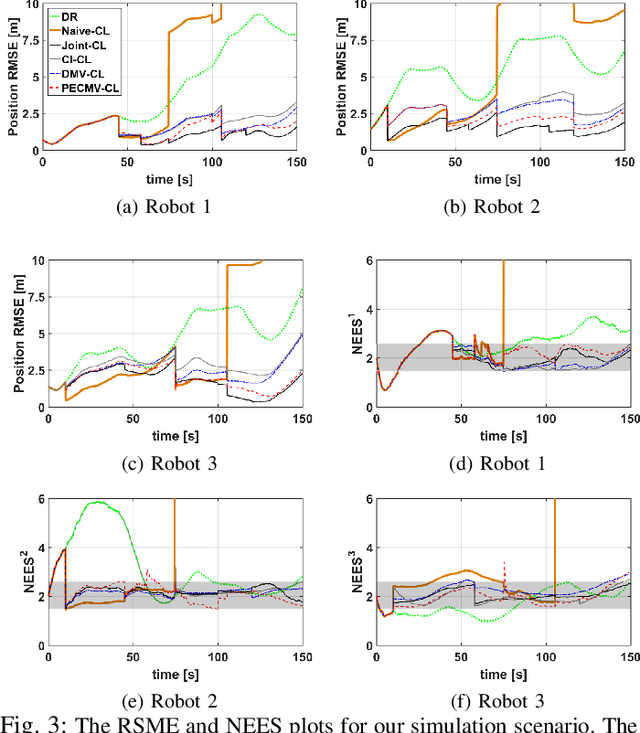
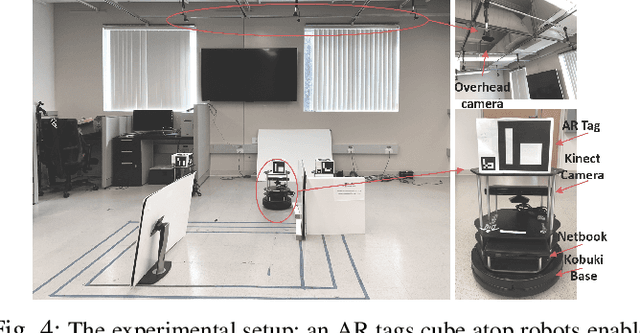
We report two novel decentralized multi-agent cooperative localization algorithms in which, to reduce the communication cost, inter-agent state estimate correlations are not maintained but accounted for implicitly. In our first algorithm, to guarantee filter consistency, we account for unknown inter-agent correlations via an upper bound on the joint covariance matrix of the agents. In the second method, we use an optimization framework to estimate the unknown inter-agent cross-covariance matrix. In our algorithms, each agent localizes itself in a global coordinate frame using a local filter driven by local dead reckoning and occasional absolute measurement updates and opportunistically corrects its pose estimate whenever a relative measurement takes place between this agent and another mobile agent. To process that relative measurement, only those two agents need to communicate with each other. Consequently, our algorithms are decentralized algorithms that do not impose restrictive network-wide connectivity condition. Moreover, we make no assumptions about the type of agents or relative measurements. We demonstrate our algorithms in simulation and a robotic experiment.