 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSplitAdapter: Load-Aware Humanoid Loco-Manipulation via Factorized Adaptation
Jun 02, 2026Humanoid loco-manipulation requires stable whole-body control under varying object masses and pickup/placement heights. This becomes particularly challenging in sim-to-real transfer, where object-induced load variation and robot-side dynamics mismatch interact during physical contact. Existing history-based adapters often compress these factors into a single latent representation, which can weaken robustness under heavy-load manipulation. We propose \textbf{SplitAdapter: Load-Aware Humanoid Loco-Manipulation via Factorized Adaptation}, which freezes a pretrained box manipulation policy and extends it with object/load and dynamics-aware context encoders trained with split world-model objectives, GRL-based cross-adversarial regularization, and hierarchical Feature-wise Linear Modulation (FiLM). In sim-to-sim experiments and real-world deployment, SplitAdapter improves Full-task success over the base policy and world-model FiLM baselines across object masses of $2$, $4$, and $6$ kg and pickup/placement heights of $0$, $30$, and $60$ cm, with the largest improvements under heavy-load conditions.
SafeFlow: Real-Time Text-Driven Humanoid Whole-Body Control via Physics-Guided Rectified Flow and Selective Safety Gating
Mar 25, 2026Recent advances in real-time interactive text-driven motion generation have enabled humanoids to perform diverse behaviors. However, kinematics-only generators often exhibit physical hallucinations, producing motion trajectories that are physically infeasible to track with a downstream motion tracking controller or unsafe for real-world deployment. These failures often arise from the lack of explicit physics-aware objectives for real-robot execution and become more severe under out-of-distribution (OOD) user inputs. Hence, we propose SafeFlow, a text-driven humanoid whole-body control framework that combines physics-guided motion generation with a 3-Stage Safety Gate driven by explicit risk indicators. SafeFlow adopts a two-level architecture. At the high level, we generate motion trajectories using Physics-Guided Rectified Flow Matching in a VAE latent space to improve real-robot executability, and further accelerate sampling via Reflow to reduce the number of function evaluations (NFE) for real-time control. The 3-Stage Safety Gate enables selective execution by detecting semantic OOD prompts using a Mahalanobis score in text-embedding space, filtering unstable generations via a directional sensitivity discrepancy metric, and enforcing final hard kinematic constraints such as joint and velocity limits before passing the generated trajectory to a low-level motion tracking controller. Extensive experiments on the Unitree G1 demonstrate that SafeFlow outperforms prior diffusion-based methods in success rate, physical compliance, and inference speed, while maintaining diverse expressiveness.
Dual-MPC Footstep Planning for Robust Quadruped Locomotion
Nov 11, 2025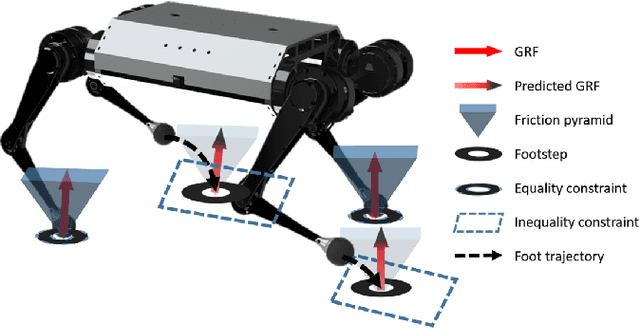
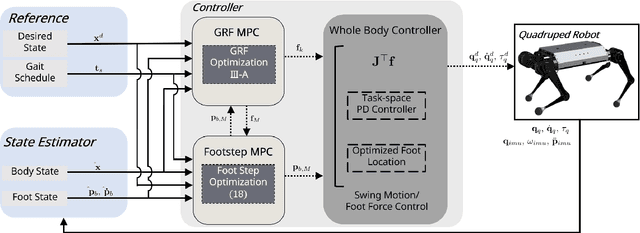
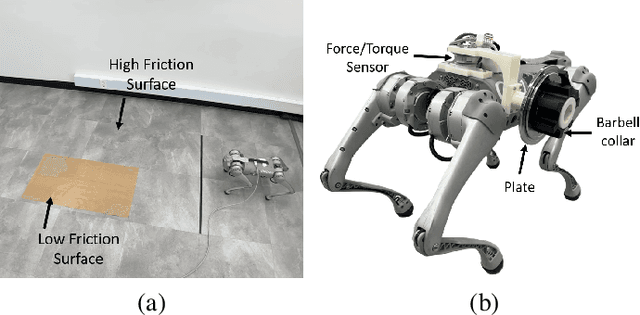
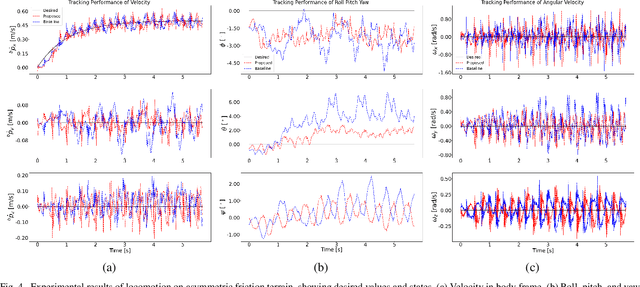
In this paper, we propose a footstep planning strategy based on model predictive control (MPC) that enables robust regulation of body orientation against undesired body rotations by optimizing footstep placement. Model-based locomotion approaches typically adopt heuristic methods or planning based on the linear inverted pendulum model. These methods account for linear velocity in footstep planning, while excluding angular velocity, which leads to angular momentum being handled exclusively via ground reaction force (GRF). Footstep planning based on MPC that takes angular velocity into account recasts the angular momentum control problem as a dual-input approach that coordinates GRFs and footstep placement, instead of optimizing GRFs alone, thereby improving tracking performance. A mutual-feedback loop couples the footstep planner and the GRF MPC, with each using the other's solution to iteratively update footsteps and GRFs. The use of optimal solutions reduces body oscillation and enables extended stance and swing phases. The method is validated on a quadruped robot, demonstrating robust locomotion with reduced oscillations, longer stance and swing phases across various terrains.