 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTESO: Online Tracking of Essential Matrix by Stochastic Optimization
Apr 21, 2026Maintaining long-term accuracy of stereo camera calibration parameters is important for autonomous systems' perception. This work proposes Online Tracking of Essential Matrix by Stochastic Optimization (TESO). The core mechanisms of TESO are: 1) a robust loss function based on kernel correlation over tentative correspondences, 2) an adaptive online stochastic optimization on the essential manifold. TESO has low CPU and memory requirements, relies on a few hyperparameters, and eliminates the need for data-driven training, enabling the usage in resource-constrained online perception systems. We evaluated the influence of TESO on geometric precision, rectification quality, and stereo depth consistency. On the large-scale MAN TruckScenes dataset, TESO tracks rotational calibration drift with 0.12 deg precision in the Y-axis (critical for stereo accuracy) while the X- and Z-axes are five times more precise. Tracking applied to sequences with simulated drift shows similar precision with respect to the reference as tracking applied to no-drift sequences, indicating the tracker is unbiased. On the KITTI dataset, TESO revealed systematic inconsistencies in extrinsic parameters across stereo pairs, confirming previous published findings. We verified that intrinsic decalibration affected these errors, as evidenced by the conflicting behavior of the rectification and depth metrics. After correcting the reference calibration, TESO improved its rotation precision around the Y-axis 20 times to 0.025 deg and its depth accuracy 50 times. Despite its lightweight design, direct optimization of the proposed TESO loss function alone achieves accuracy comparable to that of neural network-based single-frame methods.
TransNet: A deep network for fast detection of common shot transitions
Jun 08, 2019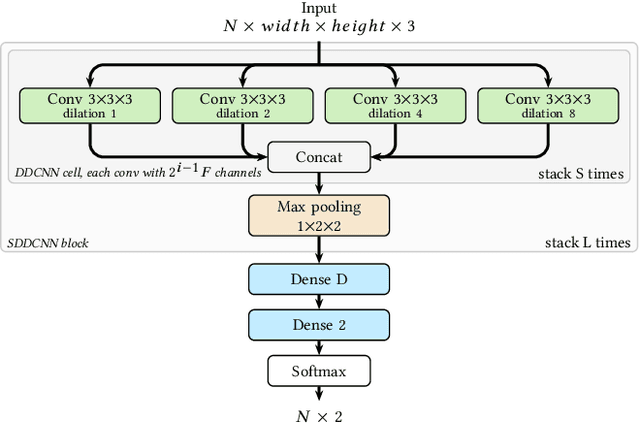
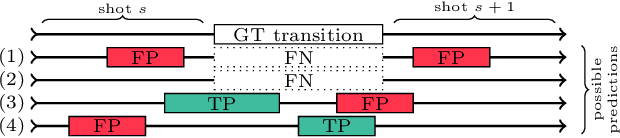
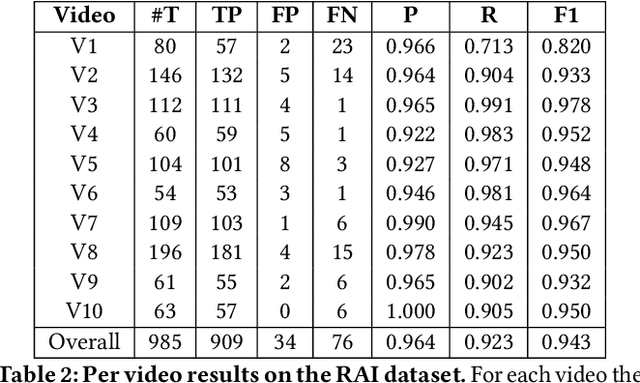

Shot boundary detection (SBD) is an important first step in many video processing applications. This paper presents a simple modular convolutional neural network architecture that achieves state-of-the-art results on the RAI dataset with well above real-time inference speed even on a single mediocre GPU. The network employs dilated convolutions and operates just on small resized frames. The training process employed randomly generated transitions using selected shots from the TRECVID IACC.3 dataset. The code and a selected trained network will be available at https://github.com/soCzech/TransNet.