 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePractical Mission Planning for Optimized UAV-Sensor Wireless Recharging
Mar 09, 2022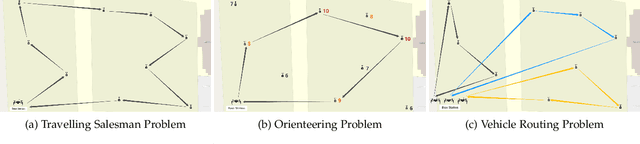
Recharging Internet of Things devices using autonomous robots is an attractive maintenance solution. Ensuring efficient and reliable performance of autonomous power delivery vehicles is very challenging in dynamic environments. Our work considers a hybrid Travelling Salesman Problem and Orienteering Problem scenario where the optimization objective is to jointly minimize discharged energy of the power delivery vehicle and maximize recharged energy of devices. This is decomposed as an NP-hard nonconvex optimization and nonlinear integer programming problem. Many studies have demonstrated satisfactory performance of heuristic algorithms' ability to solve specific routing problems, however very few studies explore online updating (i.e., mission re-planning `on the fly') for such hybrid scenarios. In this paper, we present a novel lightweight and reliable mission planner that solves the problem by combining offline search and online reevaluation. We propose Rapid Online Metaheuristic-based Planner, ROMP, a multi-objective offline and online mission planner that can incorporate real-time state information from the power delivery vehicle and its local environment to deliver reliable, up-to-date and near-optimal mission planning. We supplement Guided Local Search (via Google OR-Tools) with a Black Hole-inspired algorithm. Our results show that the proposed solver improves the solution quality offered by Guided Local Search in most of the cases tested. We also demonstrate latency performance improvements by applying a parallelization strategy.