 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomatic Coverage Selection for Surface-Based Visual Localization
Jun 27, 2019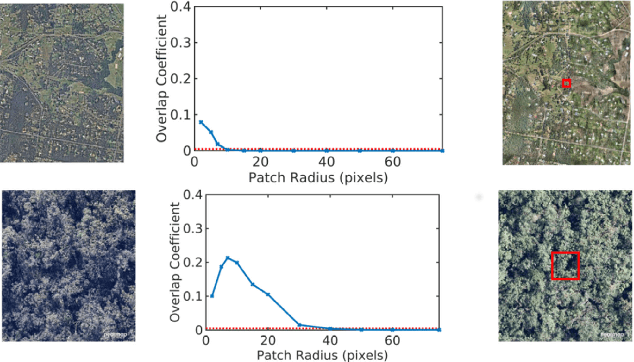
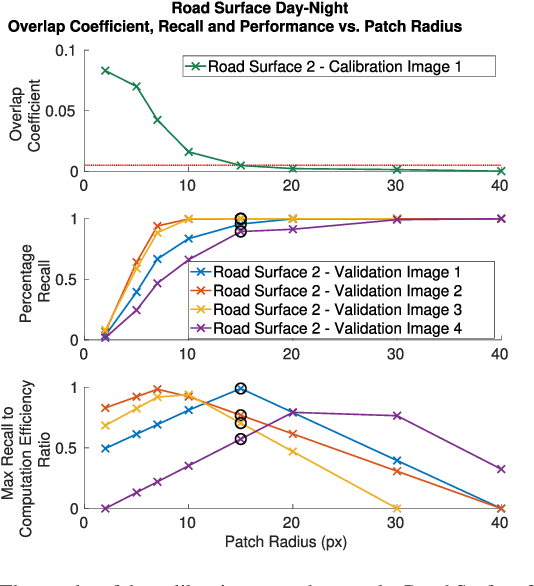
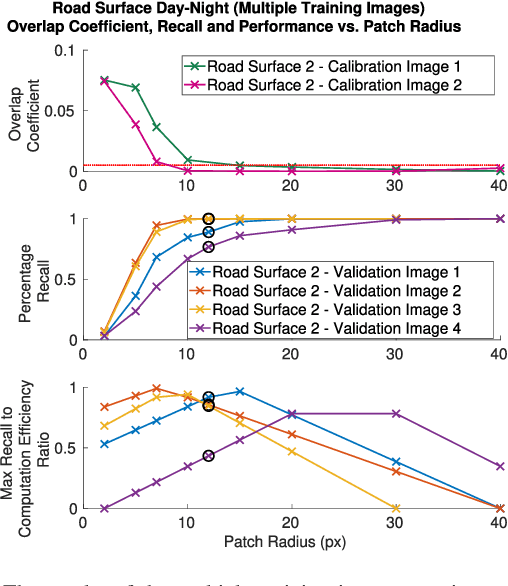
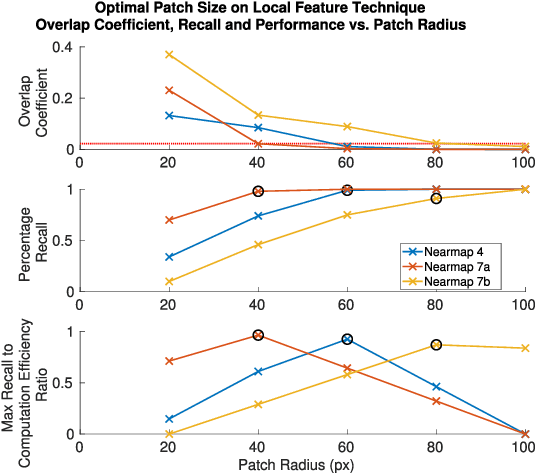
Localization is a critical capability for robots, drones and autonomous vehicles operating in a wide range of environments. One of the critical considerations for designing, training or calibrating visual localization systems is the coverage of the visual sensors equipped on the platforms. In an aerial context for example, the altitude of the platform and camera field of view plays a critical role in how much of the environment a downward facing camera can perceive at any one time. Furthermore, in other applications, such as on roads or in indoor environments, additional factors such as camera resolution and sensor placement altitude can also affect this coverage. The sensor coverage and the subsequent processing of its data also has significant computational implications. In this paper we present for the first time a set of methods for automatically determining the trade-off between coverage and visual localization performance, enabling the identification of the minimum visual sensor coverage required to obtain optimal localization performance with minimal compute. We develop a localization performance indicator based on the overlapping coefficient, and demonstrate its predictive power for localization performance with a certain sensor coverage. We evaluate our method on several challenging real-world datasets from aerial and ground-based domains, and demonstrate that our method is able to automatically optimize for coverage using a small amount of calibration data. We hope these results will assist in the design of localization systems for future autonomous robot, vehicle and flying systems.
2D Visual Place Recognition for Domestic Service Robots at Night
May 25, 2016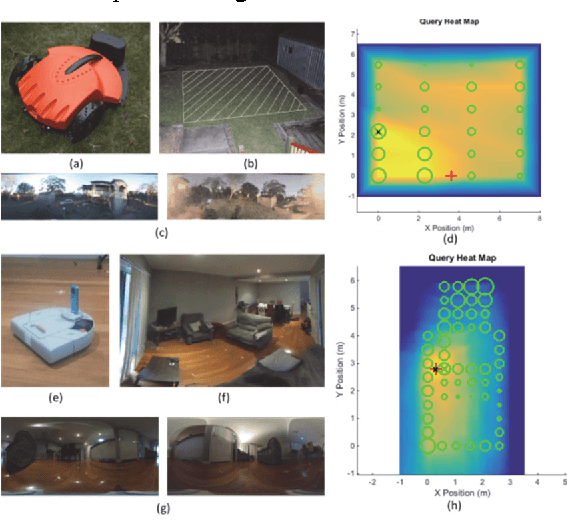
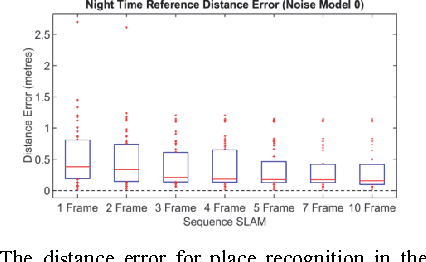
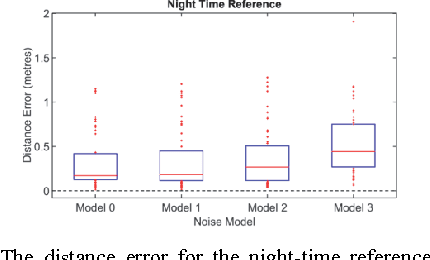
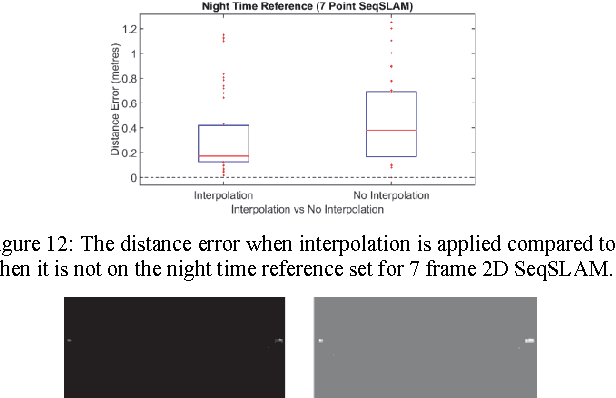
Domestic service robots such as lawn mowing and vacuum cleaning robots are the most numerous consumer robots in existence today. While early versions employed random exploration, recent systems fielded by most of the major manufacturers have utilized range-based and visual sensors and user-placed beacons to enable robots to map and localize. However, active range and visual sensing solutions have the disadvantages of being intrusive, expensive, or only providing a 1D scan of the environment, while the requirement for beacon placement imposes other practical limitations. In this paper we present a passive and potentially cheap vision-based solution to 2D localization at night that combines easily obtainable day-time maps with low resolution contrast-normalized image matching algorithms, image sequence-based matching in two-dimensions, place match interpolation and recent advances in conventional low light camera technology. In a range of experiments over a domestic lawn and in a lounge room, we demonstrate that the proposed approach enables 2D localization at night, and analyse the effect on performance of varying odometry noise levels, place match interpolation and sequence matching length. Finally we benchmark the new low light camera technology and show how it can enable robust place recognition even in an environment lit only by a moonless sky, raising the tantalizing possibility of being able to apply all conventional vision algorithms, even in the darkest of nights.