 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShelfAware: Real-Time Visual-Inertial Semantic Localization in Quasi-Static Environments with Low-Cost Sensors
Dec 09, 2025Many indoor workspaces are quasi-static: global layout is stable but local semantics change continually, producing repetitive geometry, dynamic clutter, and perceptual noise that defeat vision-based localization. We present ShelfAware, a semantic particle filter for robust global localization that treats scene semantics as statistical evidence over object categories rather than fixed landmarks. ShelfAware fuses a depth likelihood with a category-centric semantic similarity and uses a precomputed bank of semantic viewpoints to perform inverse semantic proposals inside MCL, yielding fast, targeted hypothesis generation on low-cost, vision-only hardware. Across 100 global-localization trials spanning four conditions (cart-mounted, wearable, dynamic obstacles, and sparse semantics) in a semantically dense, retail environment, ShelfAware achieves a 96% success rate (vs. 22% MCL and 10% AMCL) with a mean time-to-convergence of 1.91s, attains the lowest translational RMSE in all conditions, and maintains stable tracking in 80% of tested sequences, all while running in real time on a consumer laptop-class platform. By modeling semantics distributionally at the category level and leveraging inverse proposals, ShelfAware resolves geometric aliasing and semantic drift common to quasi-static domains. Because the method requires only vision sensors and VIO, it integrates as an infrastructure-free building block for mobile robots in warehouses, labs, and retail settings; as a representative application, it also supports the creation of assistive devices providing start-anytime, shared-control assistive navigation for people with visual impairments.
Towards A Natural Language Interface for Flexible Multi-Agent Task Assignment
Nov 09, 2023

Task assignment and scheduling algorithms are powerful tools for autonomously coordinating large teams of robotic or AI agents. However, the decisions these system make often rely on components designed by domain experts, which can be difficult for non-technical end-users to understand or modify to their own ends. In this paper we propose a preliminary design for a flexible natural language interface for a task assignment system. The goal of our approach is both to grant users more control over a task assignment system's decision process, as well as render these decisions more transparent. Users can direct the task assignment system via natural language commands, which are applied as constraints to a mixed-integer linear program (MILP) using a large language model (LLM). Additionally, our proposed system can alert users to potential issues with their commands, and engage them in a corrective dialogue in order to find a viable solution. We conclude with a description of our planned user-evaluation in the simulated environment Overcooked and describe next steps towards developing a flexible and transparent task allocation system.
That's Mine! Learning Ownership Relations and Norms for Robots
Jan 10, 2019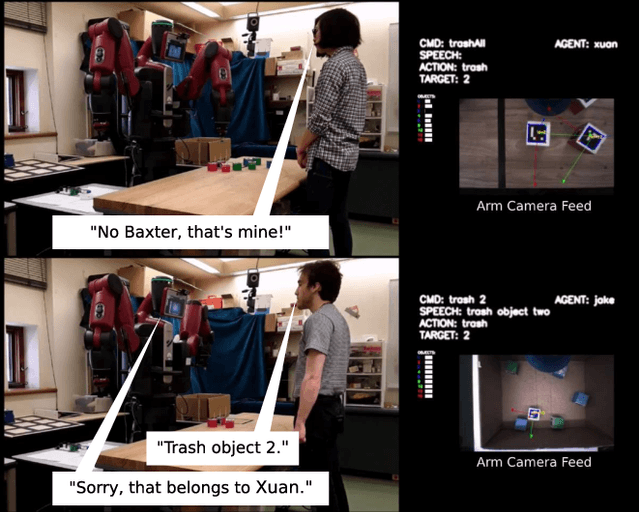
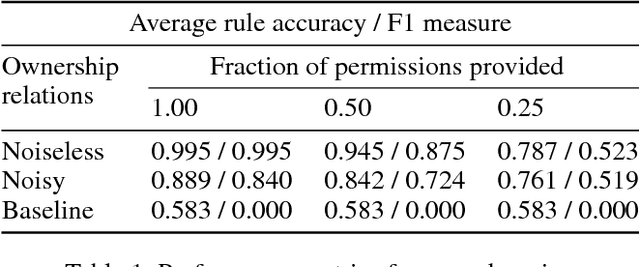
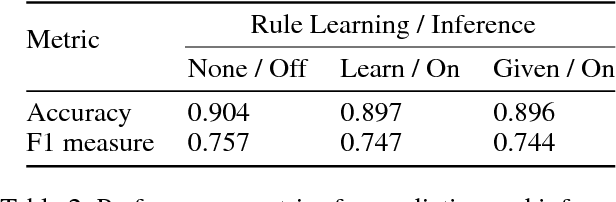

The ability for autonomous agents to learn and conform to human norms is crucial for their safety and effectiveness in social environments. While recent work has led to frameworks for the representation and inference of simple social rules, research into norm learning remains at an exploratory stage. Here, we present a robotic system capable of representing, learning, and inferring ownership relations and norms. Ownership is represented as a graph of probabilistic relations between objects and their owners, along with a database of predicate-based norms that constrain the actions permissible on owned objects. To learn these norms and relations, our system integrates (i) a novel incremental norm learning algorithm capable of both one-shot learning and induction from specific examples, (ii) Bayesian inference of ownership relations in response to apparent rule violations, and (iii) percept-based prediction of an object's likely owners. Through a series of simulated and real-world experiments, we demonstrate the competence and flexibility of the system in performing object manipulation tasks that require a variety of norms to be followed, laying the groundwork for future research into the acquisition and application of social norms.