 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnalysis of draft EU ADS Performance Requirements
Jun 03, 2021

Recently, the European Commission published draft regulation for uniform procedures and technical specification for the type-approval of motor vehicles with an automated driving system (ADS). While the draft regulation is welcome progress for an industry ready to deploy life saving automated vehicle technology, we believe that the requirements can be further improved to enhance the safety and societal acceptance of automated vehicles (AVs). In this paper, we evaluate the draft regulation's performance requirements that would impact the Dynamic Driving Task (DDT). We highlight potential problems that can arise from the current proposed requirements and propose practical recommendations to improve the regulation.
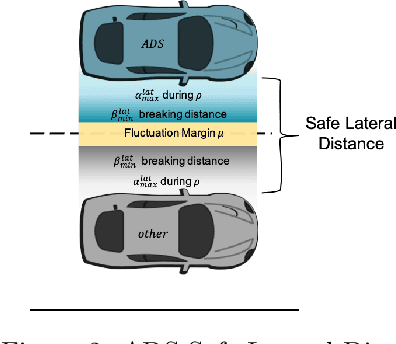
Sensors, Safety Models and A System-Level Approach to Safe and Scalable Automated Vehicles
Sep 04, 2020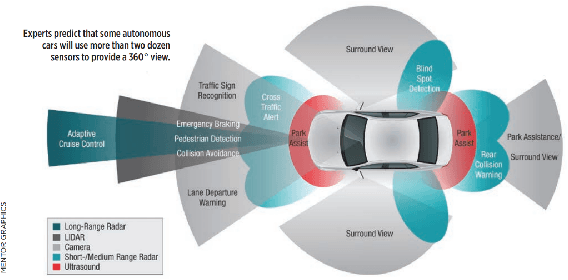
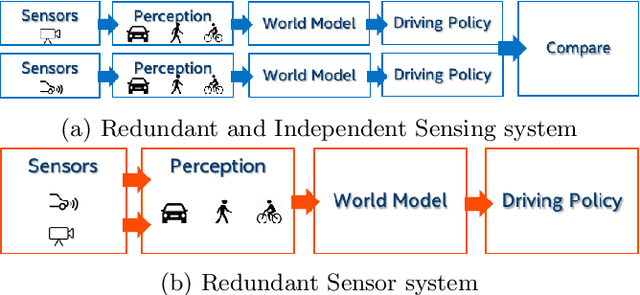
When considering the accuracy of sensors in an automated vehicle (AV), it is not sufficient to evaluate the performance of any given sensor in isolation. Rather, the performance of any individual sensor must be considered in the context of the overall system design. Techniques like redundancy and different sensing modalities can reduce the chances of a sensing failure. Additionally, the use of safety models is essential to understanding whether any particular sensing failure is relevant. Only when the entire system design is taken into account can one properly understand the meaning of safety-relevant sensing failures in an AV. In this paper, we will consider what should actually constitute a sensing failure, how safety models play an important role in mitigating potential failures, how a system-level approach to safety will deliver a safe and scalable AV, and what an acceptable sensing failure rate should be considering the full picture of an AV's architecture.
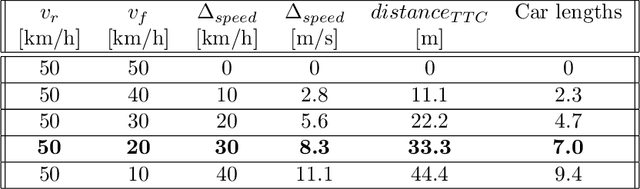
Autonomous Vehicles Meet the Physical World: RSS, Variability, Uncertainty, and Proving Safety (Expanded Version)
Oct 31, 2019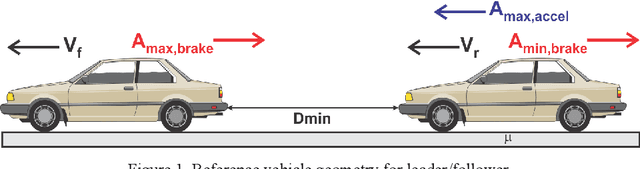
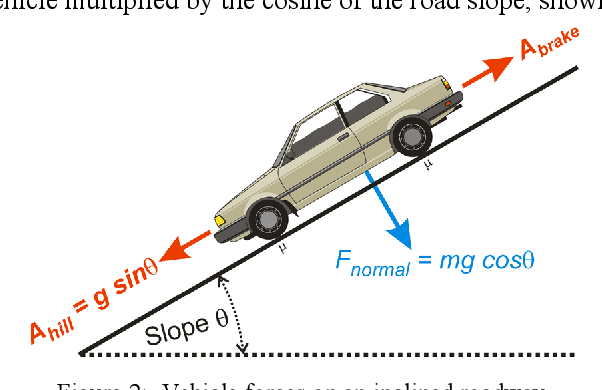
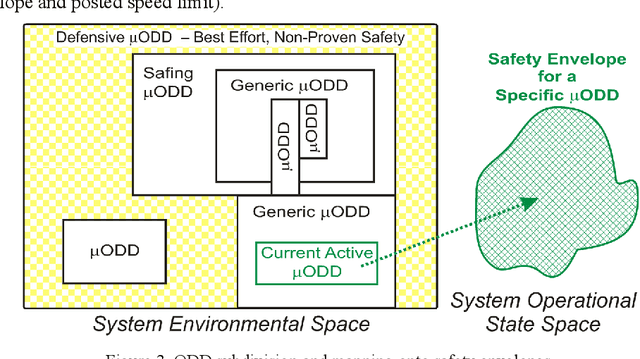
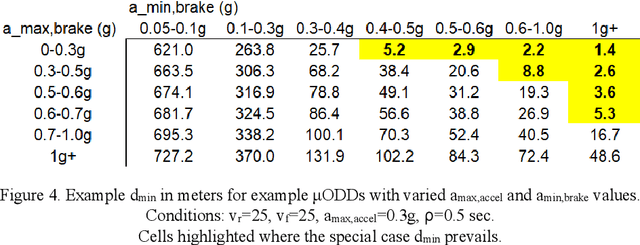
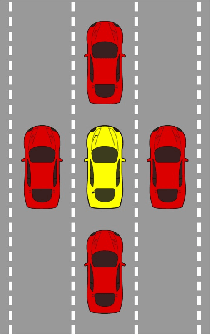
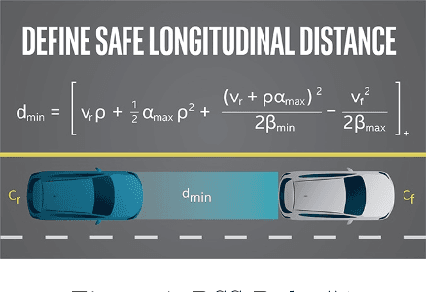
The Responsibility-Sensitive Safety (RSS) model offers provable safety for vehicle behaviors such as minimum safe following distance. However, handling worst-case variability and uncertainty may significantly lower vehicle permissiveness, and in some situations safety cannot be guaranteed. Digging deeper into Newtonian mechanics, we identify complications that result from considering vehicle status, road geometry and environmental parameters. An especially challenging situation occurs if these parameters change during the course of a collision avoidance maneuver such as hard braking. As part of our analysis, we expand the original RSS following distance equation to account for edge cases involving potential collisions mid-way through a braking process. We additionally propose a Micro-Operational Design Domain ({\mu}ODD) approach to subdividing the operational space as a way of improving permissiveness. Confining probabilistic aspects of safety to {\mu}ODD transitions permits proving safety (when possible) under the assumption that the system has transitioned to the correct {\mu}ODD for the situation. Each {\mu}ODD can additionally be used to encode system fault responses, take credit for advisory information (e.g., from vehicle-to-vehicle communication), and anticipate likely emergent situations.