 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards automatic extraction and validation of on-street parking spaces using park-out events data
Feb 12, 2021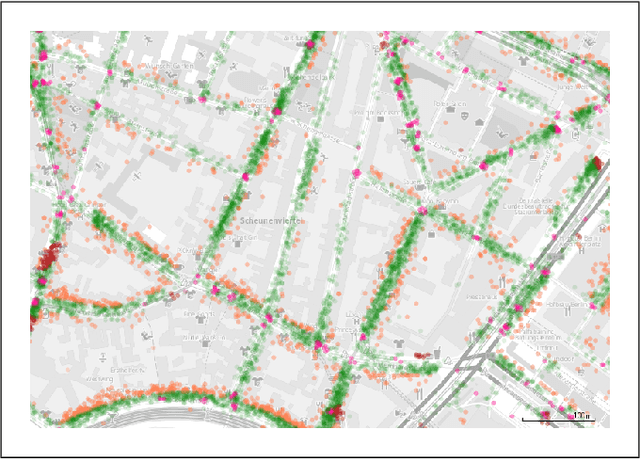

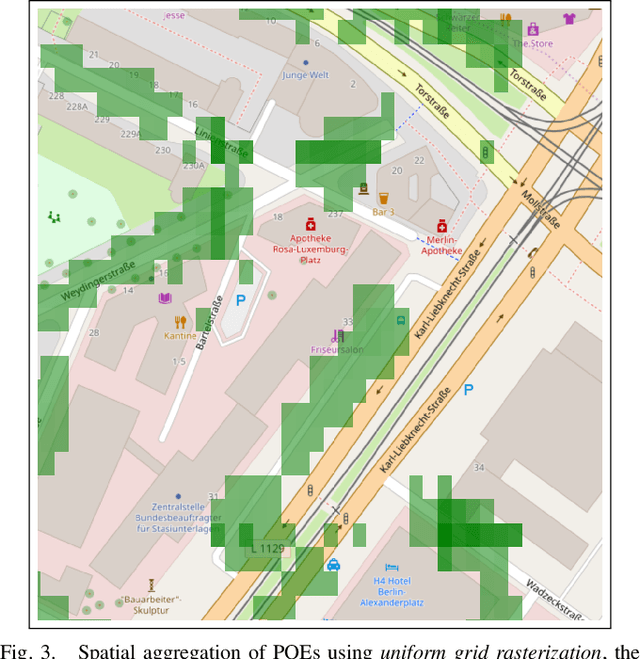
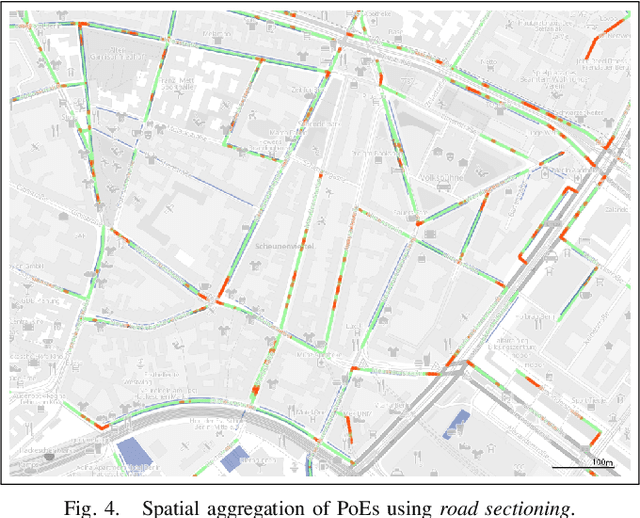
This article proposes two different approaches to automatically create a map for valid on-street car parking spaces. For this, we use park-out events data from car2go. The first one uses spatial aggregation and the second a machine learning algorithm. For the former, we chose rasterization and road sectioning; for the latter we chose decision trees. We compare the results of these approaches and discuss their advantages and disadvantages. Furthermore, we show our results for a neighborhood in the city of Berlin and report a classification accuracy of 92% on the original imbalanced data. Finally, we discuss further work; from gathering more data over a longer period of time to fitting spatial Gaussian densities to the data and the usage of apps for manual validation and annotation of parking spaces to improve ground truth data.
A model for traffic incident prediction using emergency braking data
Feb 12, 2021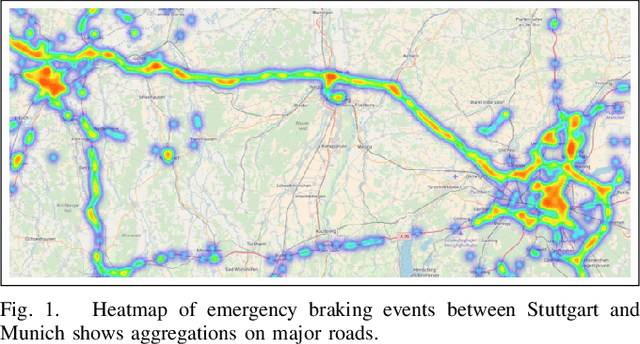
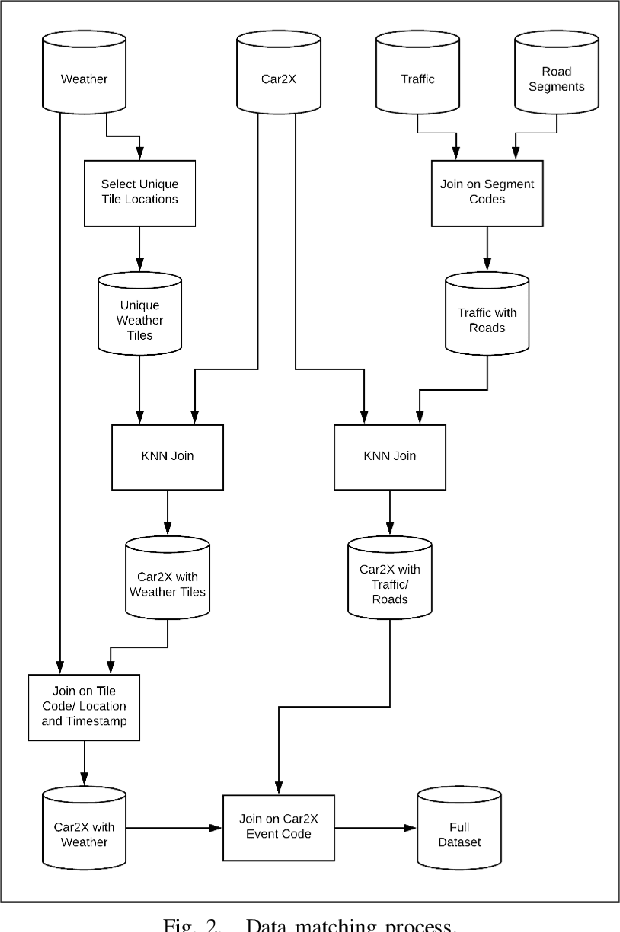
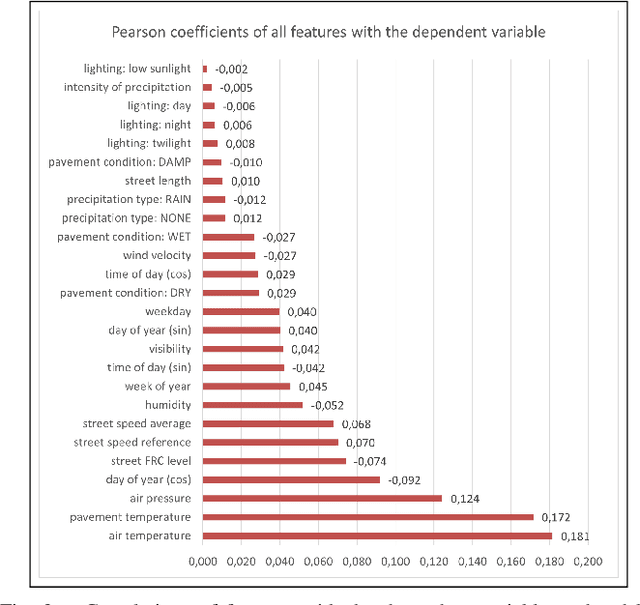
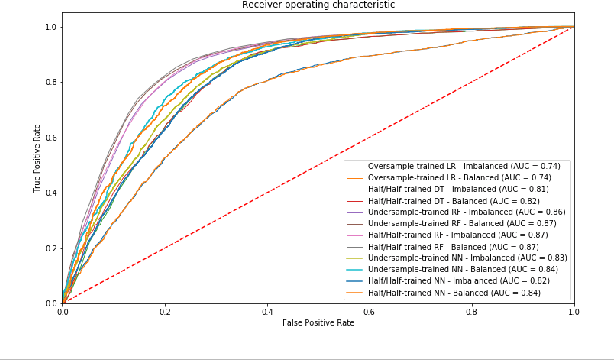
This article presents a model for traffic incident prediction. Specifically, we address the fundamental problem of data scarcity in road traffic accident prediction by training our model on emergency braking events instead of accidents. Based on relevant risk factors for traffic accidents and corresponding data categories, we evaluate different options for preprocessing sparse data and different Machine Learning models. Furthermore, we present a prototype implementing a traffic incident prediction model for Germany based on emergency braking data from Mercedes-Benz vehicles as well as weather, traffic and road data, respectively. After model evaluation and optimisation, we found that a Random Forest model trained on artificially balanced (under-sampled) data provided the highest classification accuracy of 85% on the original imbalanced data. Finally, we present our conclusions and discuss further work; from gathering more data over a longer period of time to build stronger classification systems, to addition of internal factors such as the driver's visual and cognitive attention.