 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing 6G Wireless Intelligence: Do LLMs Work for CSI Prediction?
Apr 05, 2026In high-mobility 6G scenarios, rapidly time-varying channels lead to very short coherence times, which makes conventional pilot-based channel state information (CSI) estimation approaches prone to outdated information or excessive pilot overhead. Therefore, channel prediction becomes essential in such dynamic wireless systems. To address this challenge, large language models (LLMs) are emerging learning frameworks that have recently attracted attention for CSI prediction due to their strong sequence modeling capability and ability to generalize across different environments. This paper proposes an LLM-based framework for channel prediction in high-mobility orthogonal time frequency space (OTFS) communication systems. In this work, we develop a physics-aware LLM-based predictor that learns the temporal evolution of OTFS channel coefficients from historical channel observations while incorporating mobility-related physical descriptors (e.g., maximum Doppler frequency) to achieve accurate prediction of future channel states in rapidly time-varying environments. The effectiveness of the proposed framework is evaluated through extensive simulations under user velocities ranging from 100 to 500 km/h. Numerical results show that the proposed method consistently achieves lower normalized mean square error (NMSE) compared with both classical deep learning predictors and LLM-based predictors without physical channel descriptors. These results demonstrate the advantage of integrating mobility-related channel knowledge with LLM-based sequence modeling for channel prediction in highly dynamic OTFS systems.
LemgoRL: An open-source Benchmark Tool to Train Reinforcement Learning Agents for Traffic Signal Control in a real-world simulation scenario
Mar 30, 2021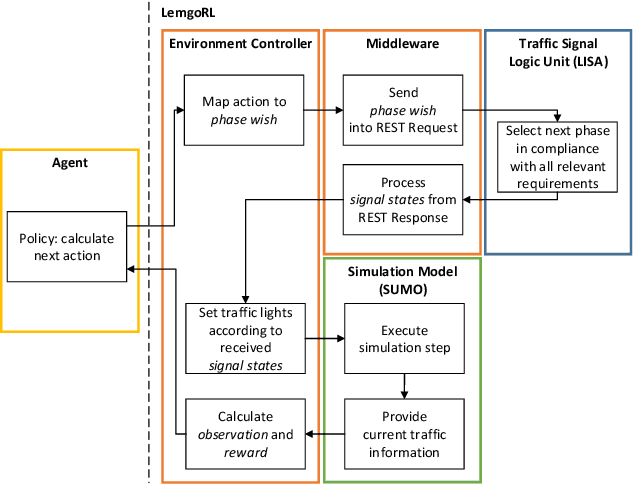
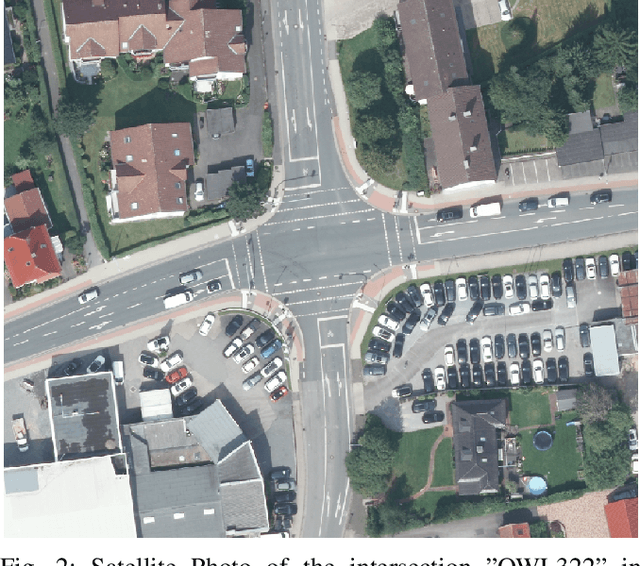
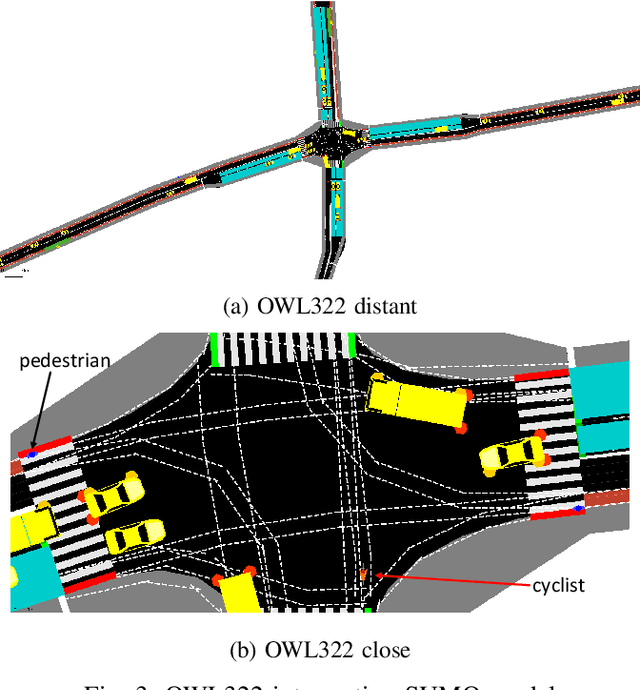
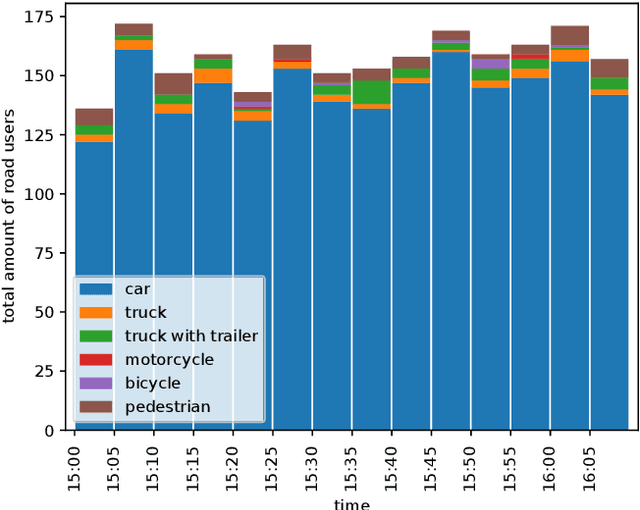
Sub-optimal control policies in intersection traffic signal controllers (TSC) contribute to congestion and lead to negative effects on human health and the environment. Reinforcement learning (RL) for traffic signal control is a promising approach to design better control policies and has attracted considerable research interest in recent years. However, most work done in this area used simplified simulation environments of traffic scenarios to train RL-based TSC. To deploy RL in real-world traffic systems, the gap between simplified simulation environments and real-world applications has to be closed. Therefore, we propose LemgoRL, a benchmark tool to train RL agents as TSC in a realistic simulation environment of Lemgo, a medium-sized town in Germany. In addition to the realistic simulation model, LemgoRL encompasses a traffic signal logic unit that ensures compliance with all regulatory and safety requirements. LemgoRL offers the same interface as the well-known OpenAI gym toolkit to enable easy deployment in existing research work. Our benchmark tool drives the development of RL algorithms towards real-world applications. We provide LemgoRL as an open-source tool at https://github.com/rl-ina/lemgorl.