 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Deeper Dive into the Irreversibility of PolyProtect: Making Protected Face Templates Harder to Invert
May 05, 2026This work presents a deeper analysis of the "irreversibility" property of PolyProtect, a biometric template protection method initially proposed for securing face embeddings. PolyProtect transforms embeddings into protected templates via multivariate polynomials, whose coefficients and exponents are distinct for each subject enrolled in the face recognition system. A polynomial is applied to consecutive sets of elements from a given embedding, where the amount of overlap between the sets is a tunable parameter. We begin our irreversibility analysis by demonstrating that PolyProtected templates are easier to invert using a numerical solver based on cosine distance, as opposed to Euclidean distance (used in the earlier PolyProtect work). To make this inversion more difficult, we then propose a "key selection algorithm", which tries to choose "keys" (coefficients and exponents of the PolyProtect polynomial) that enhance the irreversibility of PolyProtected templates, compared to when the keys are purely random. Our experiments show that this algorithm is effective at generating PolyProtected templates that are significantly more difficult to invert, and that it approximately equalises the irreversibility of PolyProtected templates generated using different "overlap" parameters. This allows for better control of the irreversibility versus accuracy trade-off, known to exist across different overlaps. We also show that accuracy in the PolyProtected domain can be affected by the range in which the embedding elements lie, but that this can be improved by normalizing the embeddings prior to applying PolyProtect. This work is reproducible using our open-source code.
Online and Offline Robot Programming via Augmented Reality Workspaces
Jul 05, 2021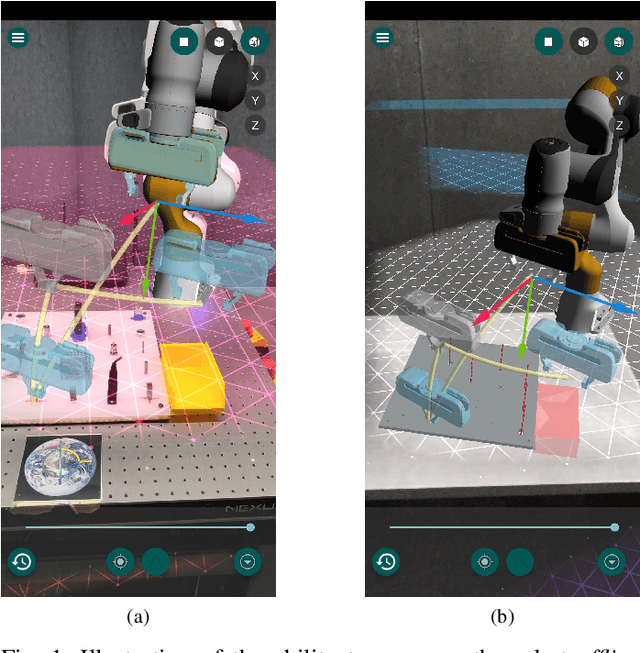
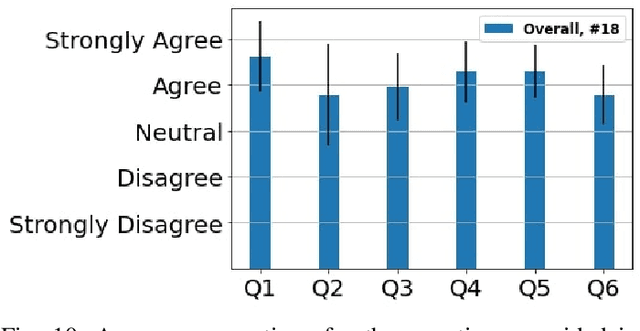
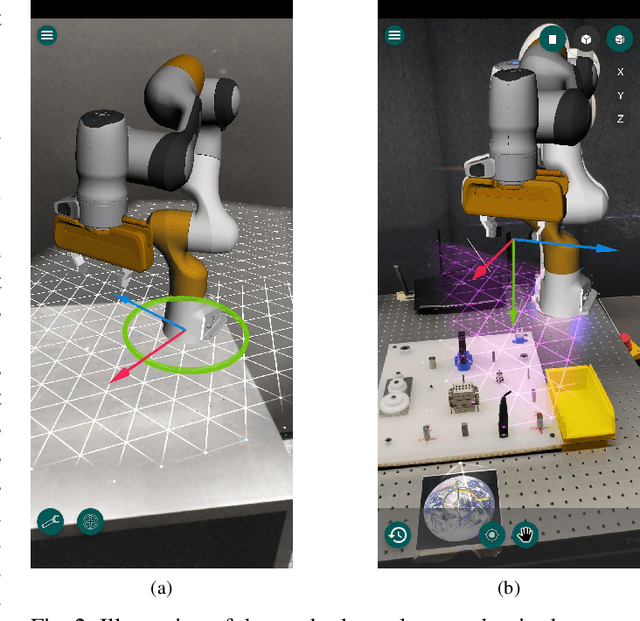
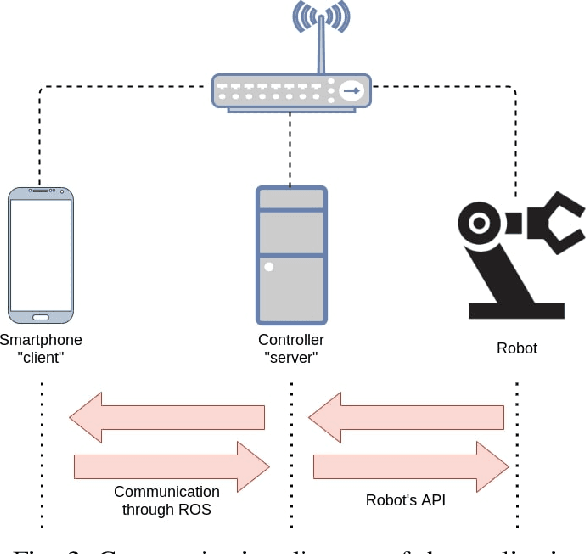
Robot programming methods for industrial robots are time consuming and often require operators to have knowledge in robotics and programming. To reduce costs associated with reprogramming, various interfaces using augmented reality have recently been proposed to provide users with more intuitive means of controlling robots in real-time and programming them without having to code. However, most solutions require the operator to be close to the real robot's workspace which implies either removing it from the production line or shutting down the whole production line due to safety hazards. We propose a novel augmented reality interface providing the users with the ability to model a virtual representation of a workspace which can be saved and reused to program new tasks or adapt old ones without having to be co-located with the real robot. Similar to previous interfaces, the operators then have the ability to program robot tasks or control the robot in real-time by manipulating a virtual robot. We evaluate the intuitiveness and usability of the proposed interface with a user study where 18 participants programmed a robot manipulator for a disassembly task.