 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-UAV Trajectory Optimization for Bearing-Only Localization in GPS Denied Environments
Feb 11, 2026Accurate localization of maritime targets by unmanned aerial vehicles (UAVs) remains challenging in GPS-denied environments. UAVs equipped with gimballed electro-optical sensors are typically used to localize targets, however, reliance on these sensors increases mechanical complexity, cost, and susceptibility to single-point failures, limiting scalability and robustness in multi-UAV operations. This work presents a new trajectory optimization framework that enables cooperative target localization using UAVs with fixed, non-gimballed cameras operating in coordination with a surface vessel. This estimation-aware optimization generates dynamically feasible trajectories that explicitly account for mission constraints, platform dynamics, and out-of-frame events. Estimation-aware trajectories outperform heuristic paths by reducing localization error by more than a factor of two, motivating their use in cooperative operations. Results further demonstrate that coordinated UAVs with fixed, non-gimballed cameras achieve localization accuracy that meets or exceeds that of single gimballed systems, while substantially lowering system complexity and cost, enabling scalability, and enhancing mission resilience.
Swarm Characteristic Classification using Robust Neural Networks with Optimized Controllable Inputs
Feb 05, 2025



Having the ability to infer characteristics of autonomous agents would profoundly revolutionize defense, security, and civil applications. Our previous work was the first to demonstrate that supervised neural network time series classification (NN TSC) could rapidly predict the tactics of swarming autonomous agents in military contexts, providing intelligence to inform counter-maneuvers. However, most autonomous interactions, especially military engagements, are fraught with uncertainty, raising questions about the practicality of using a pretrained classifier. This article addresses that challenge by leveraging expected operational variations to construct a richer dataset, resulting in a more robust NN with improved inference performance in scenarios characterized by significant uncertainties. Specifically, diverse datasets are created by simulating variations in defender numbers, defender motions, and measurement noise levels. Key findings indicate that robust NNs trained on an enriched dataset exhibit enhanced classification accuracy and offer operational flexibility, such as reducing resources required and offering adherence to trajectory constraints. Furthermore, we present a new framework for optimally deploying a trained NN by the defenders. The framework involves optimizing defender trajectories that elicit adversary responses that maximize the probability of correct NN tactic classification while also satisfying operational constraints imposed on the defenders.
Swarm Characteristics Classification Using Neural Networks
Mar 28, 2024Understanding the characteristics of swarming autonomous agents is critical for defense and security applications. This article presents a study on using supervised neural network time series classification (NN TSC) to predict key attributes and tactics of swarming autonomous agents for military contexts. Specifically, NN TSC is applied to infer two binary attributes - communication and proportional navigation - which combine to define four mutually exclusive swarm tactics. We identify a gap in literature on using NNs for swarm classification and demonstrate the effectiveness of NN TSC in rapidly deducing intelligence about attacking swarms to inform counter-maneuvers. Through simulated swarm-vs-swarm engagements, we evaluate NN TSC performance in terms of observation window requirements, noise robustness, and scalability to swarm size. Key findings show NNs can predict swarm behaviors with 97% accuracy using short observation windows of 20 time steps, while also demonstrating graceful degradation down to 80% accuracy under 50% noise, as well as excellent scalability to swarm sizes from 10 to 100 agents. These capabilities are promising for real-time decision-making support in defense scenarios by rapidly inferring insights about swarm behavior.
Bernstein approximation of optimal control problems
Dec 14, 2018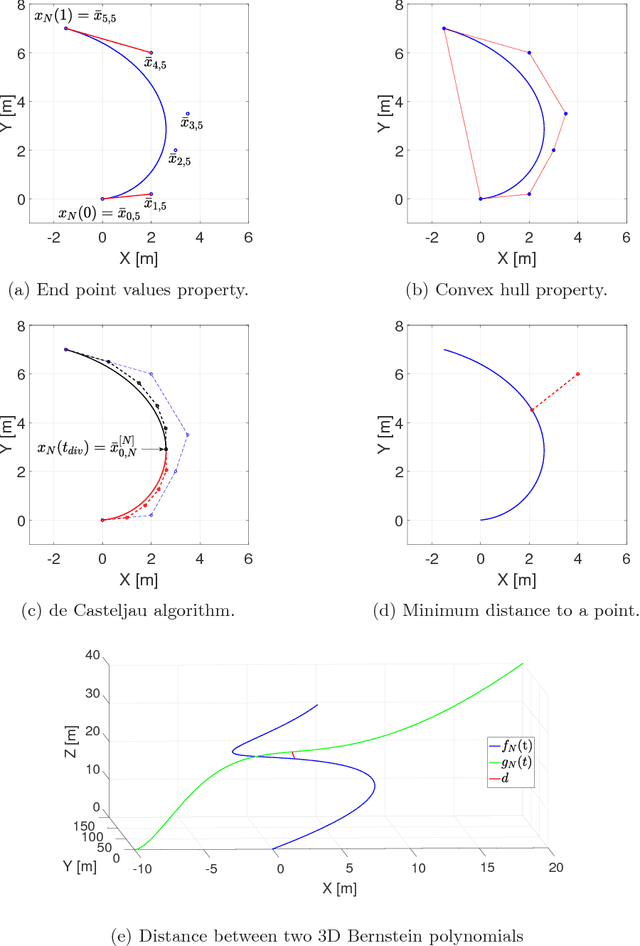
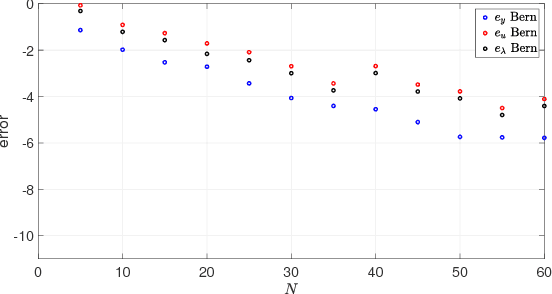
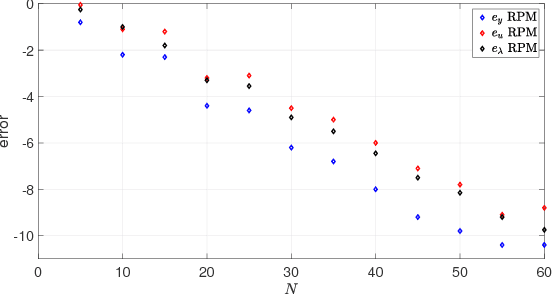
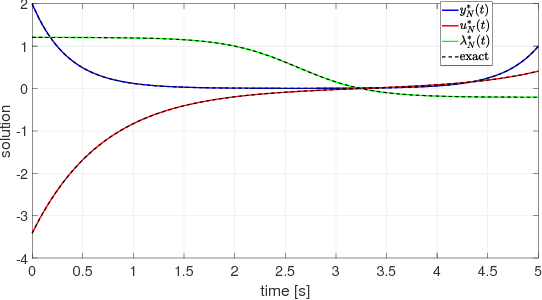
Bernstein polynomial approximation to a continuous function has a slower rate of convergence as compared to other approximation methods. "The fact seems to have precluded any numerical application of Bernstein polynomials from having been made. Perhaps they will find application when the properties of the approximant in the large are of more importance than the closeness of the approximation." -- has remarked P.J. Davis in his 1963 book Interpolation and Approximation. This paper presents a direct approximation method for nonlinear optimal control problems with mixed input and state constraints based on Bernstein polynomial approximation. We provide a rigorous analysis showing that the proposed method yields consistent approximations of time continuous optimal control problems. Furthermore, we demonstrate that the proposed method can also be used for costate estimation of the optimal control problems. This latter result leads to the formulation of the Covector Mapping Theorem for Bernstein polynomial approximation. Finally, we explore the numerical and geometric properties of Bernstein polynomials, and illustrate the advantages of the proposed approximation method through several numerical examples.