 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKeypoint-based object tracking and localization using networks of low-power embedded smart cameras
Nov 09, 2017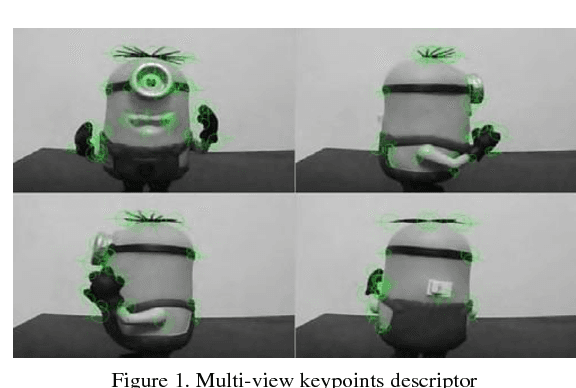

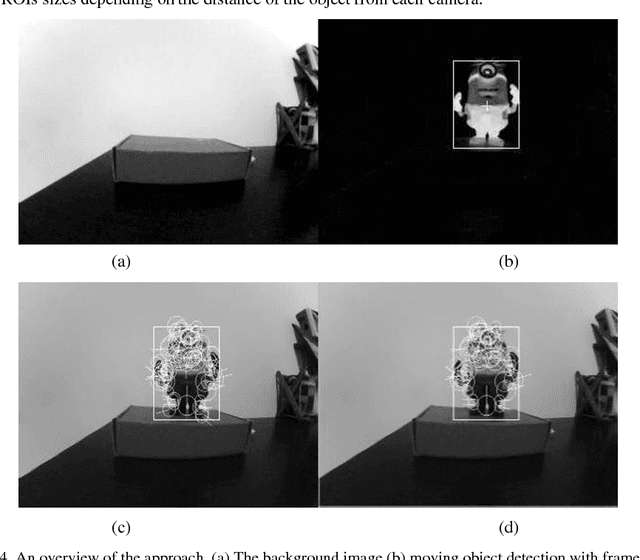
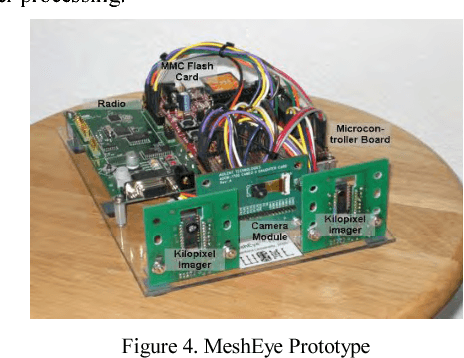
Object tracking and localization is a complex task that typically requires processing power beyond the capabilities of low-power embedded cameras. This paper presents a new approach to real-time object tracking and localization using multi-view binary keypoints descriptor. The proposed approach offers a compromise between processing power, accuracy and networking bandwidth and has been tested using multiple distributed low-power smart cameras. Additionally, multiple optimization techniques are presented to improve the performance of the keypoints descriptor for low-power embedded systems.
Openmv: A Python powered, extensible machine vision camera
Nov 01, 2017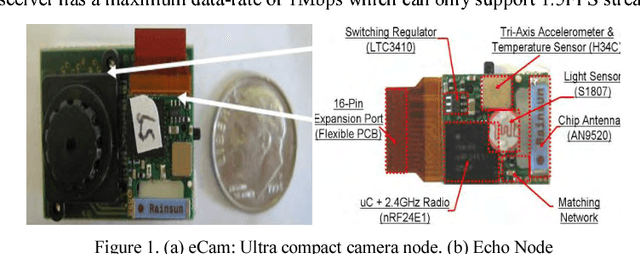

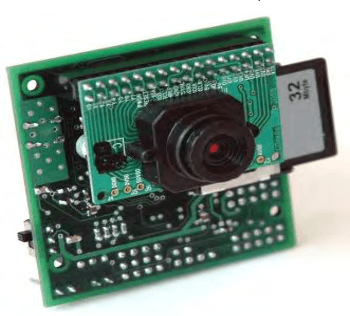
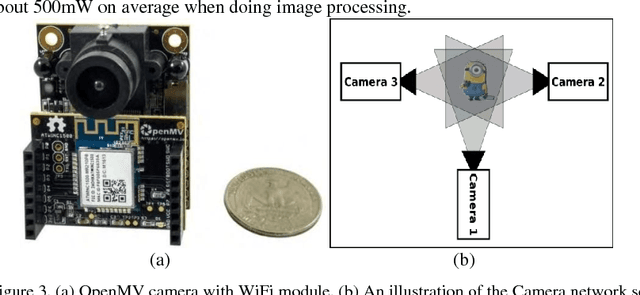
Advances in semiconductor manufacturing processes and large scale integration keep pushing demanding applications further away from centralized processing, and closer to the edges of the network (i.e. Edge Computing). It has become possible to perform complex in-network image processing using low-power embedded smart cameras, enabling a multitude of new collaborative image processing applications. This paper introduces OpenMV, a new low-power smart camera that lends itself naturally to wireless sensor networks and machine vision applications. The uniqueness of this platform lies in running an embedded Python3 interpreter, allowing its peripherals and machine vision library to be scripted in Python. In addition, its hardware is extensible via modules that augment the platform with new capabilities, such as thermal imaging and networking modules.