 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel-Free Active Input-Output Feedback Linearization of a Single-Link Flexible Joint Manipulator: An Improved ADRC Approach
Jan 18, 2019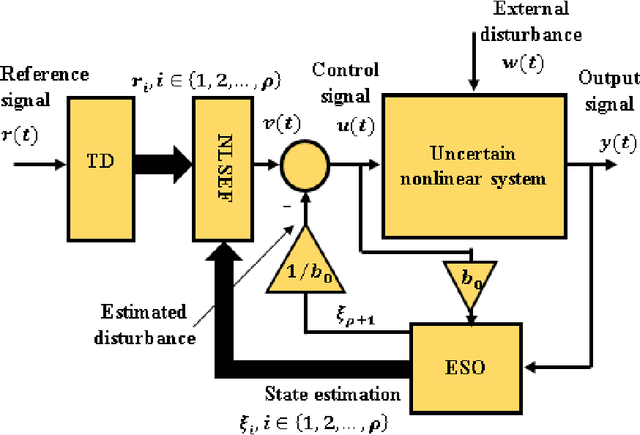



Traditional Input-Output Feedback Linearization (IOFL) requires full knowledge of system dynamics and assumes no disturbance at the input channel and no system's uncertainties. In this paper, a model-free Active Input-Output Feedback Linearization (AIOFL) technique based on an Improved Active Disturbance Rejection Control (IADRC) paradigm is proposed to design feedback linearization control law for a generalized nonlinear system with known relative degree. The Linearization Control Law(LCL) is composed of a scaled generalized disturbance estimated by an Improved Nonlinear Extended State Observer (INLESO) with saturation-like behavior and the nominal control law produced by an Improved Nonlinear State Error Feedback (INLSEF). The proposed AIOFL cancels in real-time fashion the generalized disturbances which represent all the unwanted dynamics, exogenous disturbances, and system uncertainties and transforms the system into a chain of integrators up to the relative degree of the system, the only information required about the nonlinear system. Stability analysis has been conducted based on Lyapunov functions and revealed the convergence of the INLESO and the asymptotic stability of the closed-loop system. Verification of the outcomes has been achieved by applying the proposed AIOFL technique on the Flexible Joint Single Link Manipulator (SLFJM). The simulations results validated the effectiveness of the proposed AIOFL tool based on IADRC as compared to the conventional ADRC based AIOFL and the traditional IOFL techniques.
Teleoperated Robotic Arm Movement Using EMG Signal With Wearable MYO Armband
Oct 03, 2018



The main purpose of this research is to move the robotic arm (5DoF) in real-time, based on the surface Electromyography (sEMG) signals, as obtained from the wireless Myo gesture armband to distinguish seven hand movements. The sEMG signals are biomedical signals that estimate and record the electrical signals produced in muscles through their contraction and relaxation, representing neuromuscular activities. Therefore, controlling the robotic arm via the muscles of the human arm using sEMG signals is considered to be one of the most significant methods. The wireless Myo gesture armband is used to record sEMG signals from the forearm. In order to analyze these signals, the pattern recognition system is employed, which consists of three main parts: segmentation, feature extraction, and classification. Overlap technique is chosen for segmenting part of the signal. Six time domain features (MAV, WL, RMS, AR, ZC, and SSC) are extracted from each segment. The classifiers (SVM, LDA, and KNN) are employed to enable comparison between them in order to obtain optimum accuracy of the system. The results show that the SVM achieves higher system accuracy at 96.57 %, compared to LDA reaching 96.01 %, and 92.67 % accuracy achieved by KNN.
Adaptive System Identification Using LMS Algorithm Integrated with Evolutionary Computation
Jul 17, 2018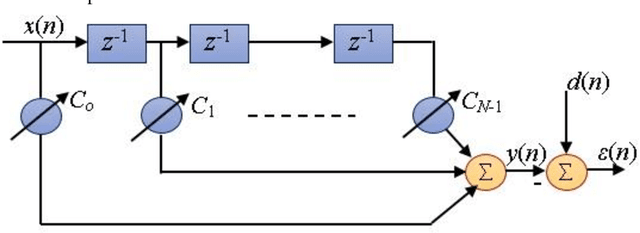
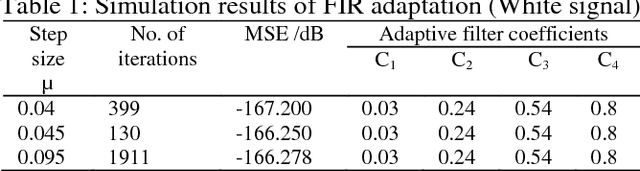
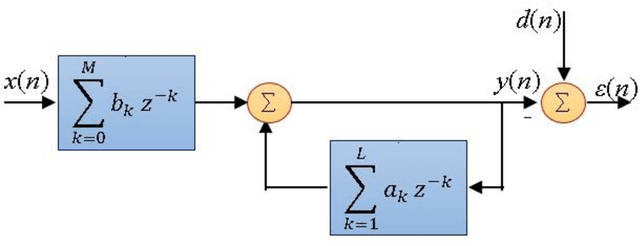
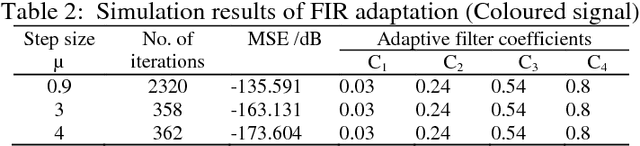
System identification is an exceptionally expansive topic and of remarkable significance in the discipline of signal processing and communication. Our goal in this paper is to show how simple adaptive FIR and IIR filters can be used in system modeling and demonstrating the application of adaptive system identification. The main objective of our research is to study the LMS algorithm and its improvement by the genetic search approach, namely, LMS-GA, to search the multi-modal error surface of the IIR filter to avoid local minima and finding the optimal weight vector when only measured or estimated data are available. Convergence analysis of the LMS algorithm in the case of coloured input signal, i.e., correlated input signal is demonstrated on adaptive FIR filter via power spectral density of the input signals and Fourier transform of the autocorrelation matrix of the input signal. Simulations have been carried out on adaptive filtering of FIR and IIR filters and tested on white and coloured input signals to validate the powerfulness of the genetic-based LMS algorithm.
Path Planning of an Autonomous Mobile Robot in a Dynamic Environment using Modified Bat Swarm Optimization
Jul 14, 2018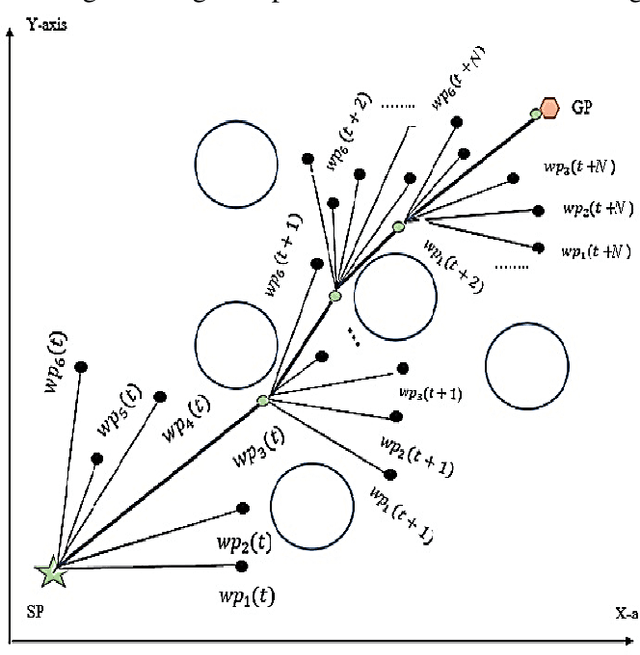

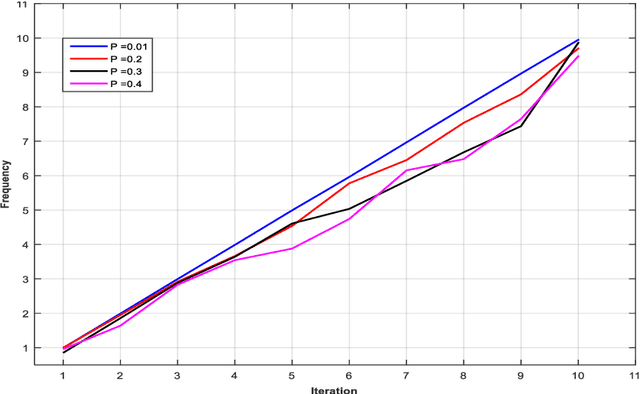

This paper outlines a modification on the Bat Algorithm (BA), a kind of swarm optimization algorithms with for the mobile robot navigation problem in a dynamic environment. The main objectives of this work are to obtain the collision-free, shortest, and safest path between starting point and end point assuming a dynamic environment with moving obstacles. A New modification on the frequency parameter of the standard BA has been proposed in this work, namely, the Modified Frequency Bat Algorithm (MFBA). The path planning problem for the mobile robot in a dynamic environment is carried out using the proposed MFBA. The path planning is achieved in two modes; the first mode is called path generation and is implemented using the MFBA, this mode is enabled when no obstacles near the mobile robot exist. When an obstacle close to the mobile robot is detected, the second mode, i.e., the obstacle avoidance (OA) is initiated. Simulation experiments have been conducted to check the validity and the efficiency of the suggested MFBA based path planning algorithm by comparing its performance with that of the standard BA. The simulation results showed that the MFBA outperforms the standard BA by planning a collision-free path with shorter, safer, and smoother than the path obtained by its BA counterpart.
An Improved Active Disturbance Rejection Control for a Differential Drive Mobile Robot with Mismatched Disturbances and Uncertainties
May 25, 2018

In this paper a new strategy based on disturbance and uncertainty (DU) estimation and attenuation technique is proposed and tested on the nonlinear kinematic model of the differential drive mobile robot (DDMR). The proposed technique is an improved version of the Active Disturbance Rejection Control (ADRC) strategy suggested by J. Han. The ADRC is used to actively reject disturbances caused by the unknown exogenous signals and the matched uncertainties of the system model, which are lumped all together and attributed as a total disturbance. In this work, the considered system is assumed to be affine and the total disturbance and the input are considered to be on different channels. To deal with the mismatched disturbances and uncertainties, the total disturbance has been converted into a matched one. Then, based on the improved ADRC (IADRC), the dynamic performance of the DDMR has been enhanced by estimating the total disturbance and canceling it from the system. Through digital simulations, different performance measures are applied, and they all indicate the effectiveness of the proposed IADRC by almost removing the chattering phenomenon and providing a high immunity in the closed-loop system against torque disturbance.
Multi-Objective Path Planning of an Autonomous Mobile Robot in Static and Dynamic Environments using a Hybrid PSO-MFB Optimisation Algorithm
May 10, 2018

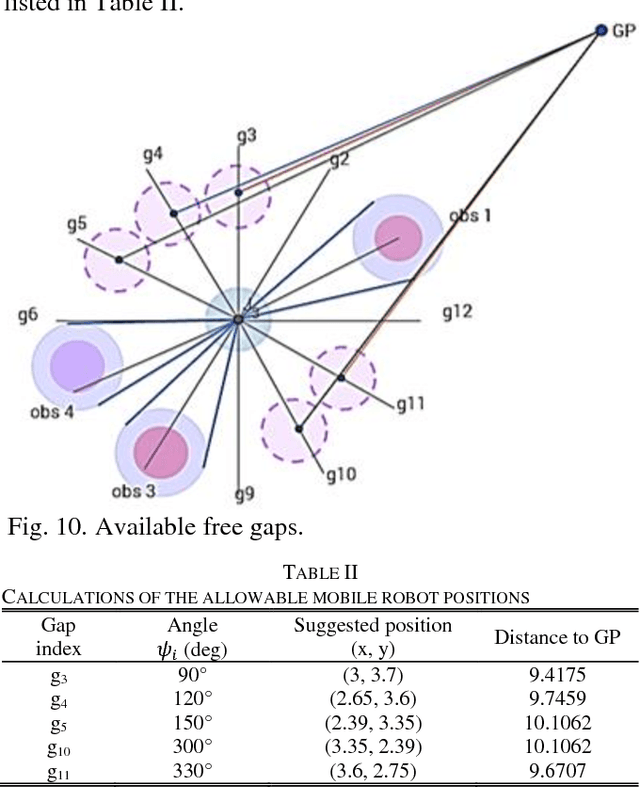

The main aim of this paper is to solve a path planning problem for an autonomous mobile robot in static and dynamic environments by determining the collision-free path that satisfies the chosen criteria for shortest distance and path smoothness. The algorithm mimics the real world by adding the actual size of the mobile robot to that of the obstacles and formulating the problem as a moving point in the free-space. The proposed path planning algorithm consists of three modules: in the first module, the path planning algorithm forms an optimised path by conducting a hybridized Particle Swarm Optimization-Modified Frequency Bat (PSO-MFB) algorithm that minimises distance and follows path smoothness criteria; in the second module, any infeasible points generated by the proposed PSO-MFB Algorithm are detected by a novel Local Search (LS) algorithm and integrated with the PSO-MFB algorithm to be converted into feasible solutions; the third module features obstacle detection and avoidance (ODA), which is triggered when the mobile robot detects obstacles within its sensing region, allowing it to avoid collision with obstacles. Simulations have been carried out that indicated that this method generates a feasible path even in complex dynamic environments and thus overcomes the shortcomings of conventional approaches such as grid methods. Comparisons with previous examples in the literature are also included in the results.