 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePath Planning of an Autonomous Mobile Robot in a Dynamic Environment using Modified Bat Swarm Optimization
Jul 14, 2018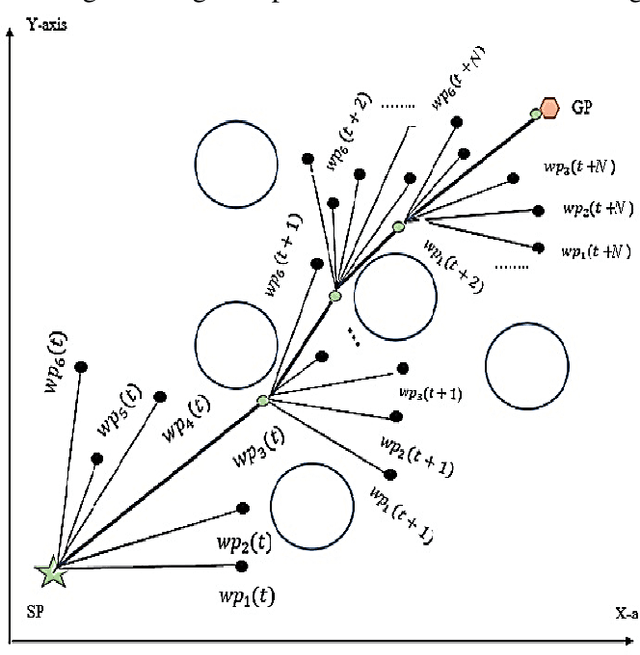


This paper outlines a modification on the Bat Algorithm (BA), a kind of swarm optimization algorithms with for the mobile robot navigation problem in a dynamic environment. The main objectives of this work are to obtain the collision-free, shortest, and safest path between starting point and end point assuming a dynamic environment with moving obstacles. A New modification on the frequency parameter of the standard BA has been proposed in this work, namely, the Modified Frequency Bat Algorithm (MFBA). The path planning problem for the mobile robot in a dynamic environment is carried out using the proposed MFBA. The path planning is achieved in two modes; the first mode is called path generation and is implemented using the MFBA, this mode is enabled when no obstacles near the mobile robot exist. When an obstacle close to the mobile robot is detected, the second mode, i.e., the obstacle avoidance (OA) is initiated. Simulation experiments have been conducted to check the validity and the efficiency of the suggested MFBA based path planning algorithm by comparing its performance with that of the standard BA. The simulation results showed that the MFBA outperforms the standard BA by planning a collision-free path with shorter, safer, and smoother than the path obtained by its BA counterpart.
Multi-Objective Path Planning of an Autonomous Mobile Robot in Static and Dynamic Environments using a Hybrid PSO-MFB Optimisation Algorithm
May 10, 2018


The main aim of this paper is to solve a path planning problem for an autonomous mobile robot in static and dynamic environments by determining the collision-free path that satisfies the chosen criteria for shortest distance and path smoothness. The algorithm mimics the real world by adding the actual size of the mobile robot to that of the obstacles and formulating the problem as a moving point in the free-space. The proposed path planning algorithm consists of three modules: in the first module, the path planning algorithm forms an optimised path by conducting a hybridized Particle Swarm Optimization-Modified Frequency Bat (PSO-MFB) algorithm that minimises distance and follows path smoothness criteria; in the second module, any infeasible points generated by the proposed PSO-MFB Algorithm are detected by a novel Local Search (LS) algorithm and integrated with the PSO-MFB algorithm to be converted into feasible solutions; the third module features obstacle detection and avoidance (ODA), which is triggered when the mobile robot detects obstacles within its sensing region, allowing it to avoid collision with obstacles. Simulations have been carried out that indicated that this method generates a feasible path even in complex dynamic environments and thus overcomes the shortcomings of conventional approaches such as grid methods. Comparisons with previous examples in the literature are also included in the results.