 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman-Centered Autonomy for UAS Target Search
Sep 18, 2023



Current methods of deploying robots that operate in dynamic, uncertain environments, such as Uncrewed Aerial Systems in search \& rescue missions, require nearly continuous human supervision for vehicle guidance and operation. These methods do not consider high-level mission context resulting in cumbersome manual operation or inefficient exhaustive search patterns. We present a human-centered autonomous framework that infers geospatial mission context through dynamic feature sets, which then guides a probabilistic target search planner. Operators provide a set of diverse inputs, including priority definition, spatial semantic information about ad-hoc geographical areas, and reference waypoints, which are probabilistically fused with geographical database information and condensed into a geospatial distribution representing an operator's preferences over an area. An online, POMDP-based planner, optimized for target searching, is augmented with this reward map to generate an operator-constrained policy. Our results, simulated based on input from five professional rescuers, display effective task mental model alignment, 18\% more victim finds, and 15 times more efficient guidance plans then current operational methods.
Semantic Sensing and Planning for Human-Robot Collaboration in Uncertain Environments
Oct 20, 2021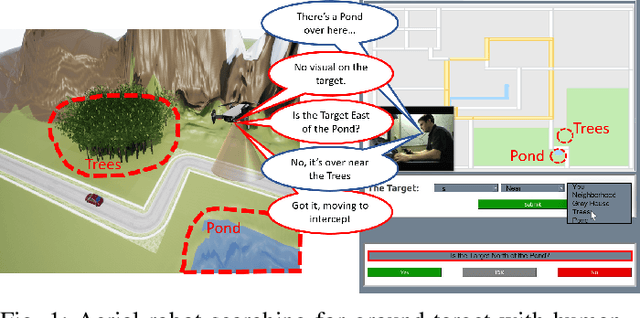
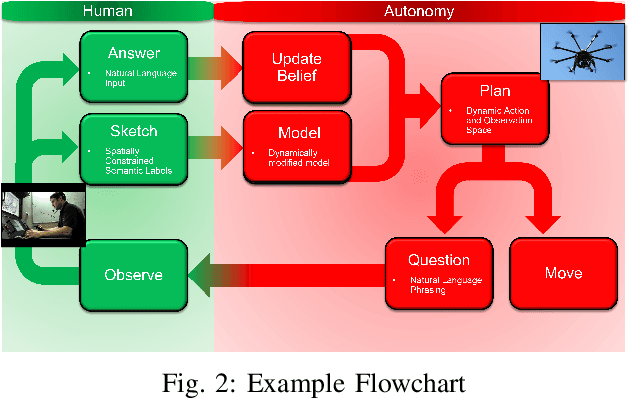
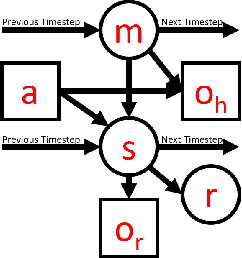
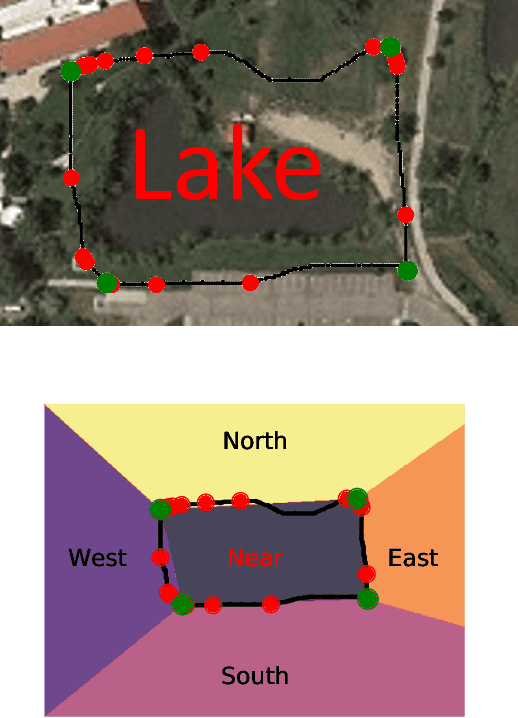
Autonomous robots can benefit greatly from human-provided semantic characterizations of uncertain task environments and states. However, the development of integrated strategies which let robots model, communicate, and act on such soft data remains challenging. Here, a framework is presented for active semantic sensing and planning in human-robot teams which addresses these gaps by formally combining the benefits of online sampling-based POMDP policies, multi-modal semantic interaction, and Bayesian data fusion. This approach lets humans opportunistically impose model structure and extend the range of semantic soft data in uncertain environments by sketching and labeling arbitrary landmarks across the environment. Dynamic updating of the environment while searching for a mobile target allows robotic agents to actively query humans for novel and relevant semantic data, thereby improving beliefs of unknown environments and target states for improved online planning. Target search simulations show significant improvements in time and belief state estimates required for interception versus conventional planning based solely on robotic sensing. Human subject studies demonstrate a average doubling in dynamic target capture rate compared to the lone robot case, employing reasoning over a range of user characteristics and interaction modalities. Video of interaction can be found at https://youtu.be/Eh-82ZJ1o4I.