 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNavigation Framework for a Hybrid Steel Bridge Inspection Robot
Feb 01, 2021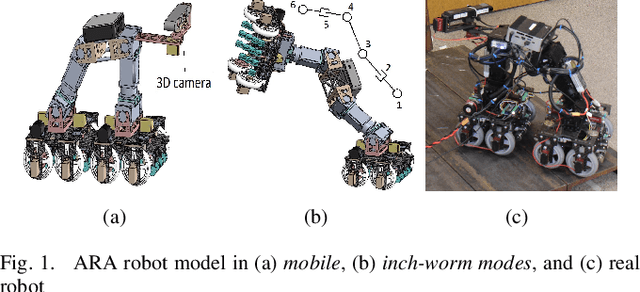
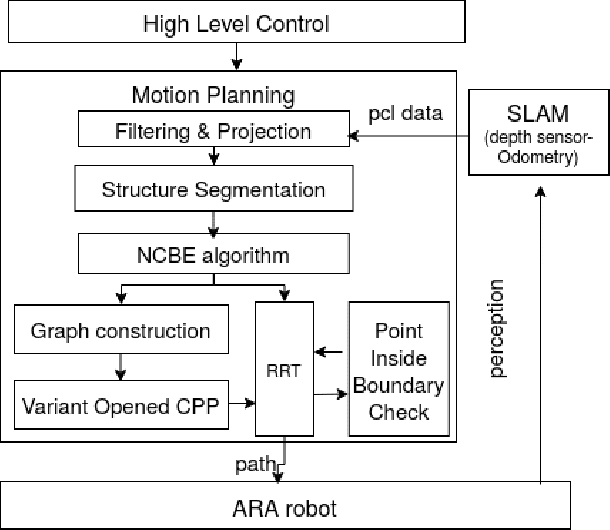
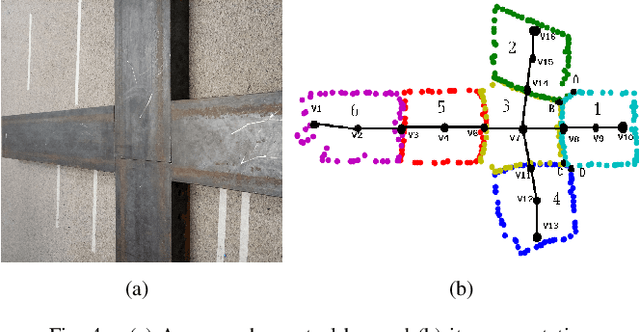
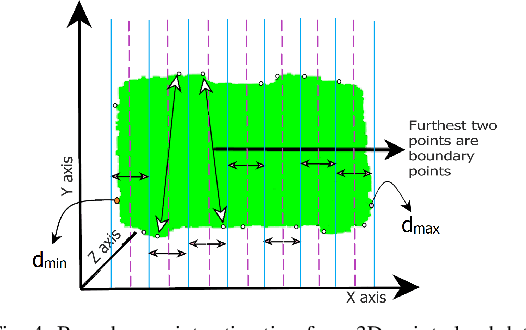
Autonomous navigation is essential for steel bridge inspection robot to monitor and maintain the working condition of steel bridges. Majority of existing robotic solutions requires human support to navigate the robot doing the inspection. In this paper, a navigation framework is proposed for ARA robot [1], [2] to run on mobile mode. In this mode, the robot needs to cross and inspect all the available steel bars. The most significant contributions of this research are four algorithms, which can process the depth data, segment it into clusters, estimate the boundaries, construct a graph to represent the structure, generate a shortest inspection path with any starting and ending points, and determine available robot configuration for path planning. Experiments on steel bridge structures setup highlight the effective performance of the algorithms, and the potential to apply to the ARA robot to run on real bridge structures. We released our source code in Github for the research community to use.
Control Framework for a Hybrid-steel Bridge Inspection Robot
Sep 01, 2020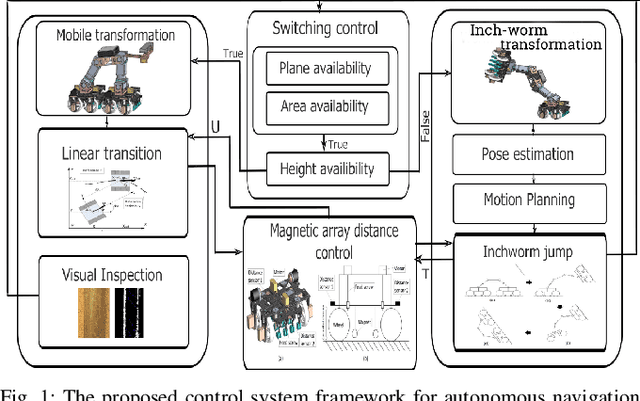
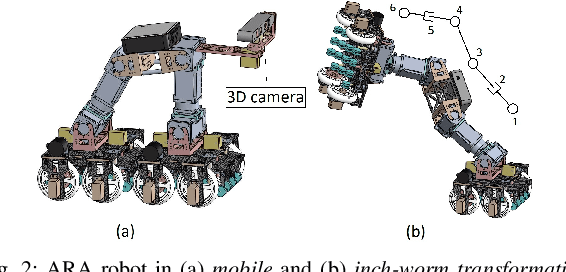
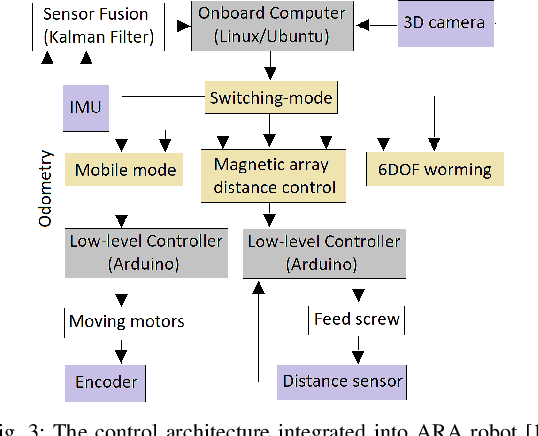
Autonomous navigation of steel bridge inspection robots is essential for proper maintenance. The majority of existing robotic solutions for bridge inspection require human intervention to assist in the control and navigation. In this paper, a control system framework has been proposed for a previously designed ARA robot [1], which facilitates autonomous real-time navigation and minimizes human involvement. The mechanical design and control framework of ARA robot enables two different configurations, namely the mobile and inch-worm transformation. In addition, a switching control was developed with 3D point clouds of steel surfaces as the input which allows the robot to switch between mobile and inch-worm transformation. The surface availability algorithm (considers plane, area, and height) of the switching control enables the robot to perform inch-worm jumps autonomously. Themobiletransformationallows the robot to move on continuous steel surfaces and perform visual inspection of steel bridge structures. Practical experiments on actual steel bridge structures highlight the effective performance of ARA robot with the proposed control framework for autonomous navigation during a visual inspection of steel bridges.
Autonomous UAV Navigation Using Reinforcement Learning
Jan 16, 2018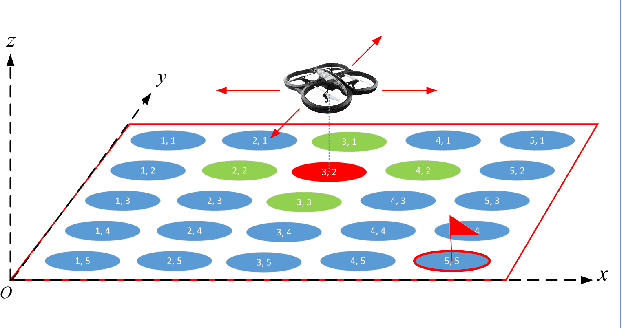
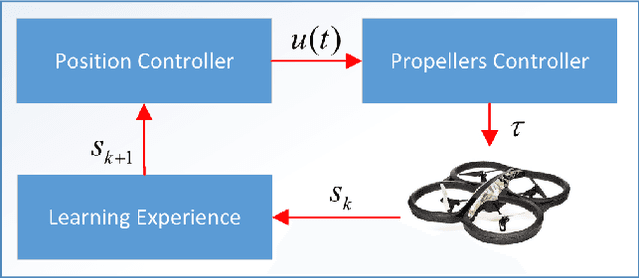
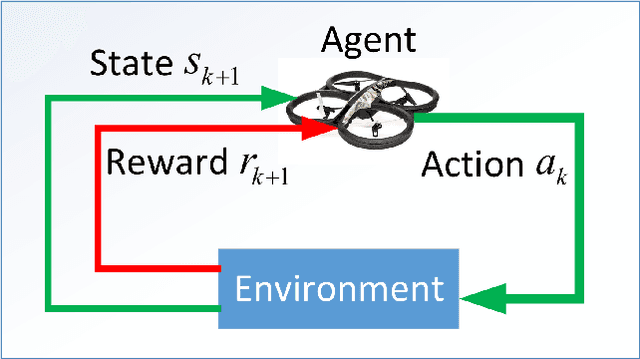
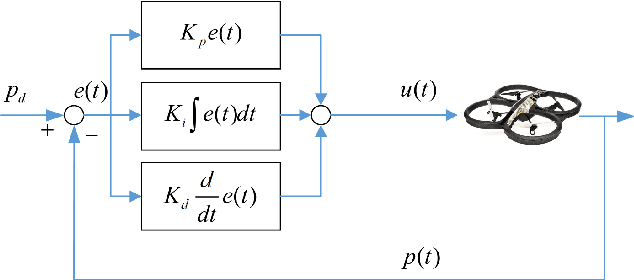
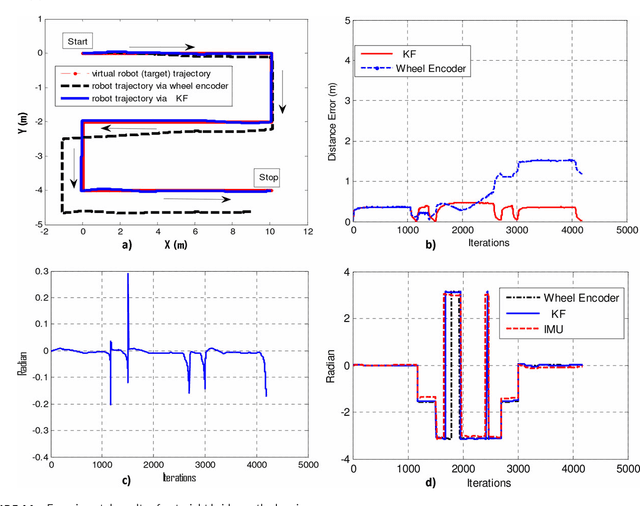
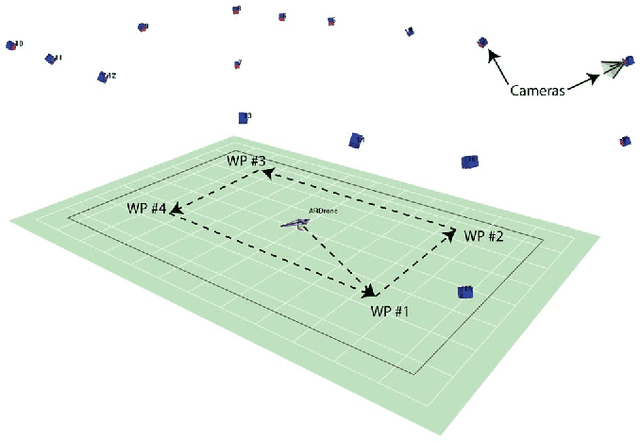
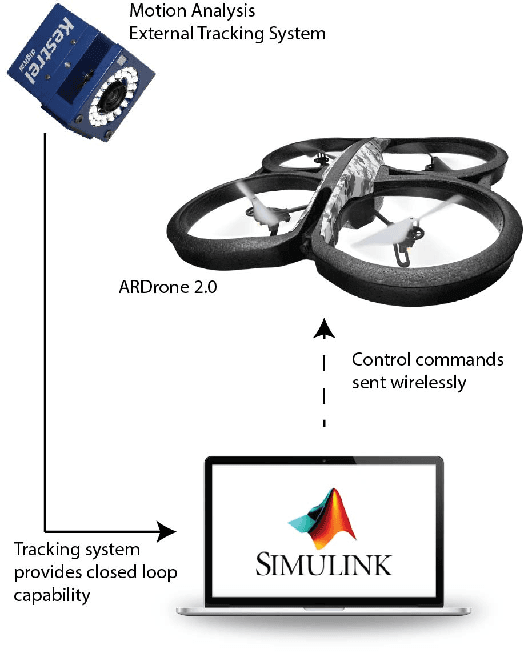
Unmanned aerial vehicles (UAV) are commonly used for missions in unknown environments, where an exact mathematical model of the environment may not be available. This paper provides a framework for using reinforcement learning to allow the UAV to navigate successfully in such environments. We conducted our simulation and real implementation to show how the UAVs can successfully learn to navigate through an unknown environment. Technical aspects regarding to applying reinforcement learning algorithm to a UAV system and UAV flight control were also addressed. This will enable continuing research using a UAV with learning capabilities in more important applications, such as wildfire monitoring, or search and rescue missions.
A Comprehensive Review of Smart Wheelchairs: Past, Present and Future
May 18, 2017
A smart wheelchair (SW) is a power wheelchair (PW) to which computers, sensors, and assistive technology are attached. In the past decade, there has been little effort to provide a systematic review of SW research. This paper aims to provide a complete state-of-the-art overview of SW research trends. We expect that the information gathered in this study will enhance awareness of the status of contemporary PW as well as SW technology, and increase the functional mobility of people who use PWs. We systematically present the international SW research effort, starting with an introduction to power wheelchairs and the communities they serve. Then we discuss in detail the SW and associated technological innovations with an emphasis on the most researched areas, generating the most interest for future research and development. We conclude with our vision for the future of SW research and how to best serve people with all types of disabilities.
Automated Robotic Monitoring and Inspection of Steel Structures and Bridges
May 13, 2017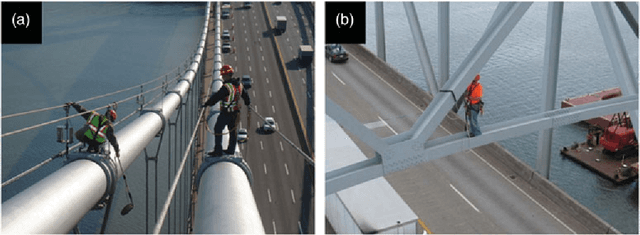

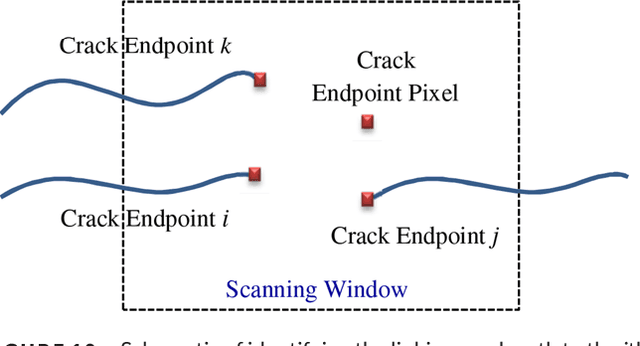
This paper presents visual and 3D structure inspection for steel structures and bridges using a developed climbing robot. The robot can move freely on a steel surface, carry sensors, collect data and then send to the ground station in real time for monitoring as well as further processing. Steel surface image stitching and 3D map building are conducted to provide a current condition of the structure. Also, a computer vision-based method is implemented to detect surface defects on stitched images. The effectiveness of the climbing robot's inspection is tested in multiple circumstances to ensure strong steel adhesion and successful data collection. The detection method was also successfully evaluated on various test images, where steel cracks could be automatically identified, without the requirement of some heuristic reasoning.
Distributed Formation Control of Nonlonolomic Mobile Robots by Bounded Feedback in the Presence of Obstacles
May 09, 2017
The problem of distributed formation control of nonholonomic mobile robots is addressed in this paper, in which the robots are designed to track a formation. Collision avoidance among agents is guaranteed using a control law based on a repulsive force. In an uncertain environment where obstacles exist, the construction of repulsive force and rotational direction enables agents to avoid and pass the obstacles. The control inputs of each robot are designed to be bounded. Numerical simulations with different formations are implemented to demonstrate the efficacy of the proposed scheme.
Distributed Formation Control for Autonomous Robots in Dynamic Environments
May 04, 2017

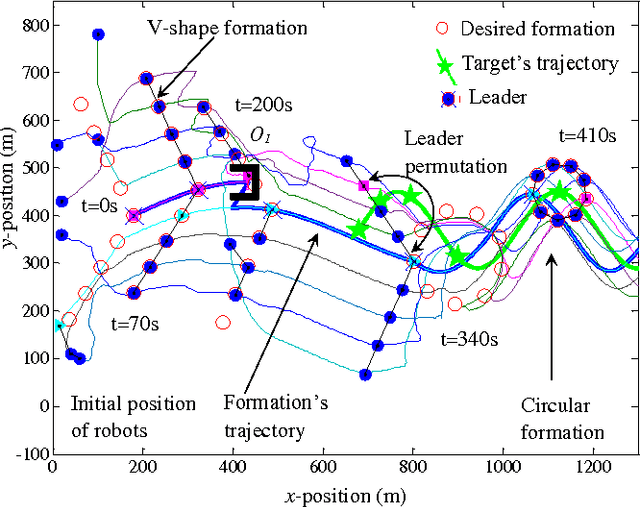

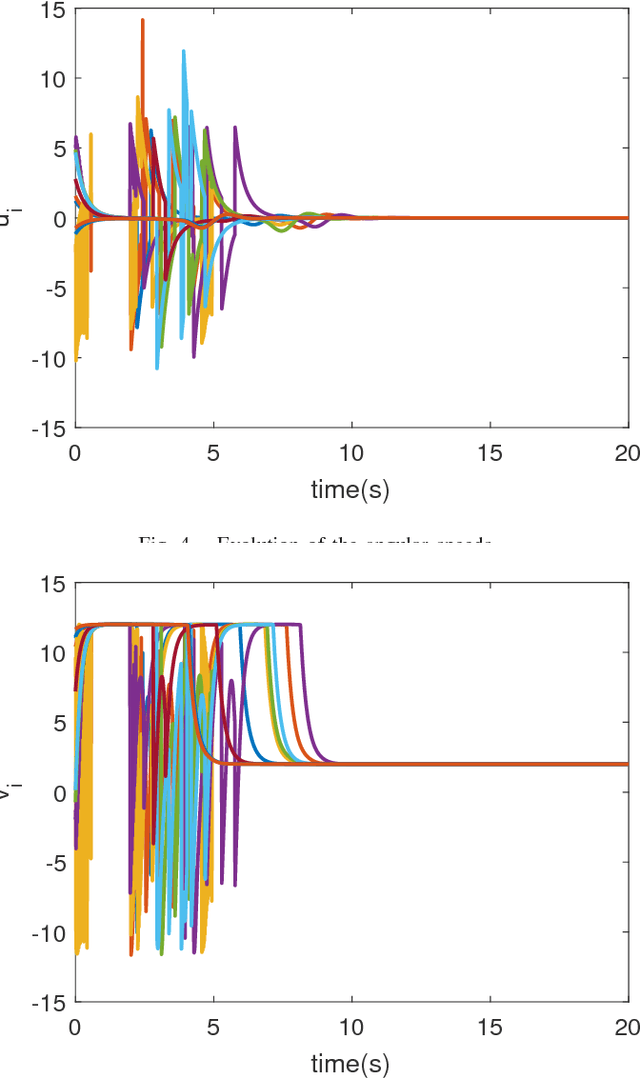
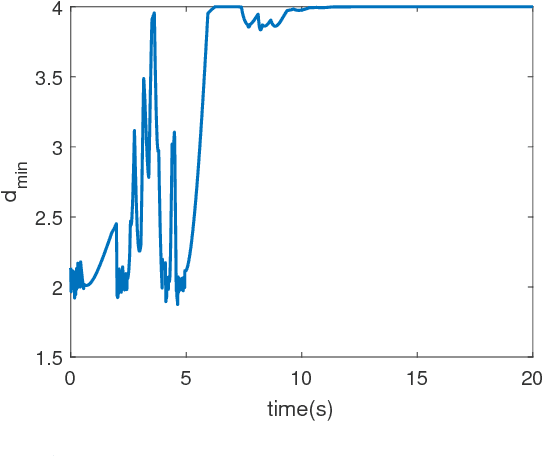
In this paper, we propose a novel and distributed formation control method for autonomous robots to follow the desired formation while tracking a moving target in dynamic environments. In our approach, the desired formations, which include the virtual nodes arranged into specific shapes, are first generated. Then, autonomous robots are controlled by the proposed artificial force fields in order to converge to these virtual nodes without collisions. The stability analysis based on the Lyapunov approach is given. Moreover, a new combination of rotational force field and repulsive force field in designing an obstacle avoidance controller allows the robot to avoid and escape the convex and nonconvex obstacle shapes. The V-shape and circular shape formations with their advantages are utilized to test the effectiveness of the proposed method.
Development of An Autonomous Bridge Deck Inspection Robotic System
Apr 24, 2017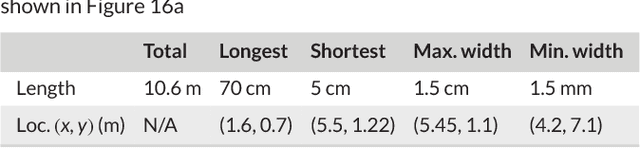

The threat to safety of aging bridges has been recognized as a critical concern to the general public due to the poor condition of many bridges in the U.S. Currently, the bridge inspection is conducted manually, and it is not efficient to identify bridge condition deterioration in order to facilitate implementation of appropriate maintenance or rehabilitation procedures. In this paper, we report a new development of the autonomous mobile robotic system for bridge deck inspection and evaluation. The robot is integrated with several nondestructive evaluation (NDE) sensors and a navigation control algorithm to allow it to accurately and autonomously maneuver on the bridge deck to collect visual images and conduct NDE measurements. The developed robotic system can reduce the cost and time of the bridge deck data collection and inspection. For efficient bridge deck monitoring, the crack detection algorithm to build the deck crack map is presented in detail. The impact-echo (IE), ultrasonic surface waves (USW) and electrical resistivity (ER) data collected by the robot are analyzed to generate the delamination, concrete elastic modulus, corrosion maps of the bridge deck, respectively. The presented robotic system has been successfully deployed to inspect numerous bridges in more than ten different states in the U.S.
A Novel Potential Field Controller for Use on Aerial Robots
Apr 15, 2017
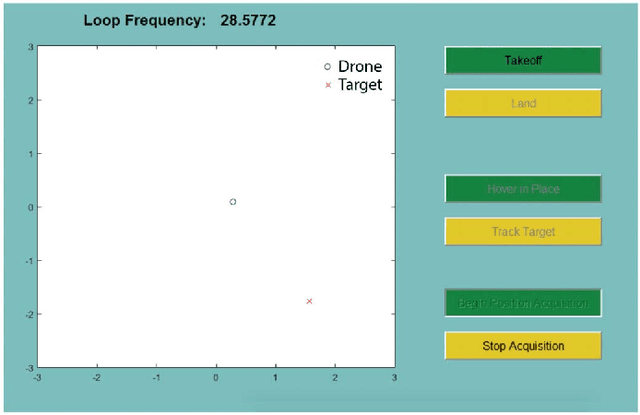
Unmanned Aerial Vehicles (UAV), commonly known as drones, have many potential uses in real world applications. Drones require advanced planning and navigation algorithms to enable them to safely move through and interact with the world around them. This paper presents an extended potential field controller (ePFC) which enables an aerial robot, or drone, to safely track a dynamic target location while simultaneously avoiding any obstacles in its path. The ePFC outperforms a traditional potential field controller (PFC) with smoother tracking paths and shorter settling times. The proposed ePFC's stability is evaluated by Lyapunov approach, and its performance is simulated in a Matlab environment. Finally, the controller is implemented on an experimental platform in a laboratory environment which demonstrates the effectiveness of the controller.
A Distributed Control Framework for a Team of Unmanned Aerial Vehicles for Dynamic Wildfire Tracking
Apr 09, 2017

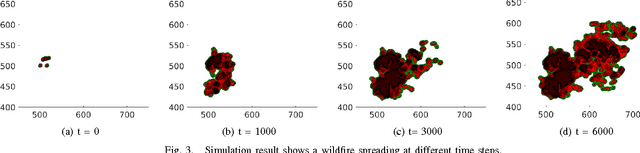
Wildland fire fighting is a very dangerous job, and the lack of information of the fire front is one of main reasons that causes many accidents. Using unmanned aerial vehicle (UAV) to cover wildfire is promising because it can replace human in hazardous fire tracking and save operation costs significantly. In this paper we propose a distributed control framework designed for a team of UAVs that can closely monitor a wildfire in open space, and precisely track its development. The UAV team, designed for flexible deployment, can effectively avoid in-flight collision as well as cooperate well with other neighbors. Experimental results are conducted to demonstrate the capabilites of the UAV team in covering a spreading wildfire.