 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Robust Control on Lie Groups Using Contraction Methods (Extended Version)
Apr 01, 2026In this paper, we propose a learning framework for synthesizing a robust controller for dynamical systems evolving on a Lie group. A robust control contraction metric (RCCM) and a neural feedback controller are jointly trained to enforce contraction conditions on the Lie group manifold. Sufficient conditions are derived for the existence of such an RCCM and neural controller, ensuring that the geometric constraints imposed by the manifold structure are respected while establishing a disturbance-dependent tube that bounds the output trajectories. As a case study, a feedback controller for a quadrotor is designed using the proposed framework. Its performance is evaluated using numerical simulations and compared with a geometric controller.
A Robust Neural Control Design for Multi-drone Slung Payload Manipulation with Control Contraction Metrics
Oct 01, 2025This paper presents a robust neural control design for a three-drone slung payload transportation system to track a reference path under external disturbances. The control contraction metric (CCM) is used to generate a neural exponentially converging baseline controller while complying with control input saturation constraints. We also incorporate the uncertainty and disturbance estimator (UDE) technique to dynamically compensate for persistent disturbances. The proposed framework yields a modularized design, allowing the controller and estimator to perform their individual tasks and achieve a zero trajectory tracking error if the disturbances meet certain assumptions. The stability and robustness of the complete system, incorporating both the CCM controller and the UDE compensator, are presented. Simulations are conducted to demonstrate the capability of the proposed control design to follow complicated trajectories under external disturbances.
Model Predictive Spherical Image-Based Visual Servoing On $SO(3)$ for Aggressive Aerial Tracking
Dec 19, 2022



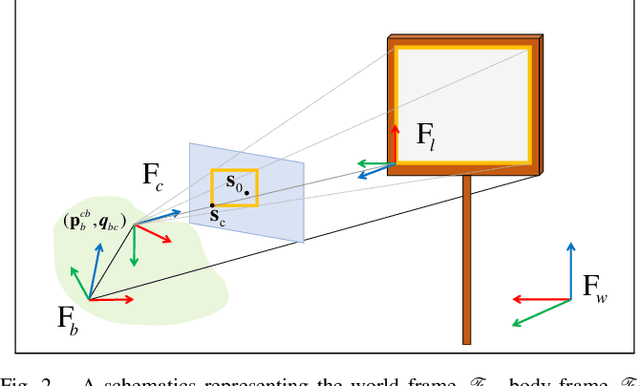
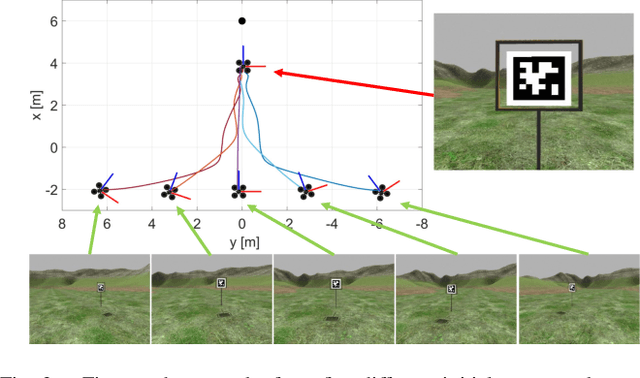
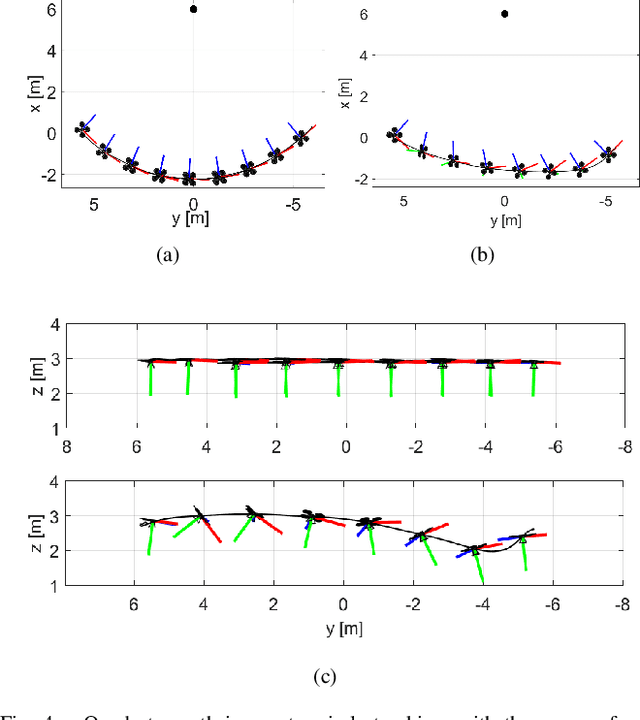
This paper presents an image-based visual servo control (IBVS) method for a first-person-view (FPV) quadrotor to conduct aggressive aerial tracking. There are three major challenges to maneuvering an underactuated vehicle using IBVS: (i) finding a visual feature representation that is robust to large rotations and is suited to be an optimization variable; (ii) keeping the target visible without sacrificing the robot's agility; and (iii) compensating for the rotational effects in the detected features. We propose a complete design framework to address these problems. First, we employ a rotation on $SO(3)$ to represent a spherical image feature on $S^{2}$ to gain singularity-free and second-order differentiable properties. To ensure target visibility, we formulate the IBVS as a nonlinear model predictive control (NMPC) problem with three constraints taken into account: the robot's physical limits, target visibility, and time-to-collision (TTC). Furthermore, we propose a novel attitude-compensation scheme to enable formulating the visibility constraint in the actual image plane instead of a virtual fix-orientation image plane. It guarantees that the visibility constraint is valid under large rotations. Extensive experimental results show that our method can track a fast-moving target stably and aggressively without the aid of a localization system.
PCVPC: Perception Constrained Visual Predictive Control For Agile Quadrotors
Sep 22, 2021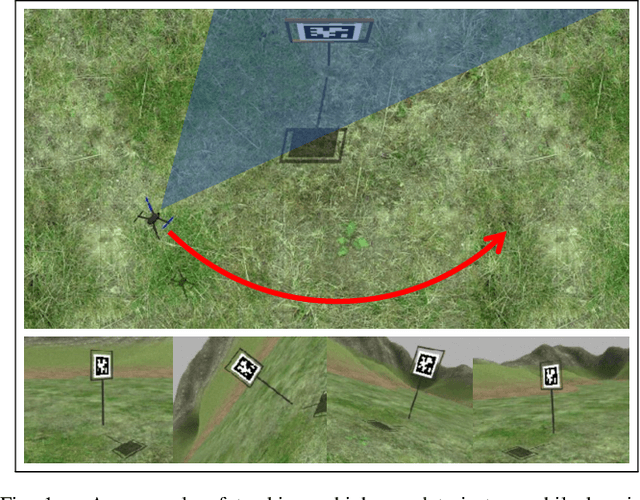
We present a perception constrained visual predictive control (PCVPC) algorithm for quadrotors to enable aggressive flights without using any position information. Our framework leverages nonlinear model predictive control (NMPC) to formulate a constrained image-based visual servoing (IBVS) problem. The quadrotor dynamics, image dynamics, actuation constraints, and visibility constraints are taken into account to handle quadrotor maneuvers with high agility. Two main challenges of applying IBVS to agile drones are considered: (i) high sensitivity of depths to intense orientation changes, and (ii) conflict between the visual servoing objective and action objective due to the underactuated nature. To deal with the first challenge, we parameterize a visual feature by a bearing vector and a distance, by which the depth will no longer be involved in the image dynamics. Meanwhile, we settle the conflict problem by compensating for the rotation in the future visual servoing cost using the predicted orientations of the quadrotor. Our approach in simulation shows that (i) it can work without any position information, (ii) it can achieve a maximum referebce speed of 9 m/s in trajectory tracking without losing the target, and (iii) it can reach a landmark, e.g., a gate in drone racing, from varied initial configurations.
Robust Cooperative Formation Control of Fixed-Wing Unmanned Aerial Vehicles
May 06, 2019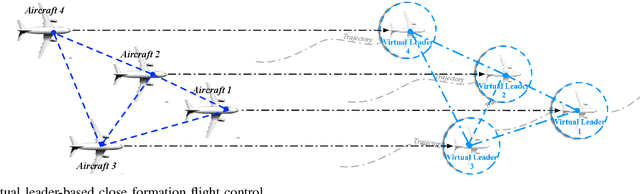
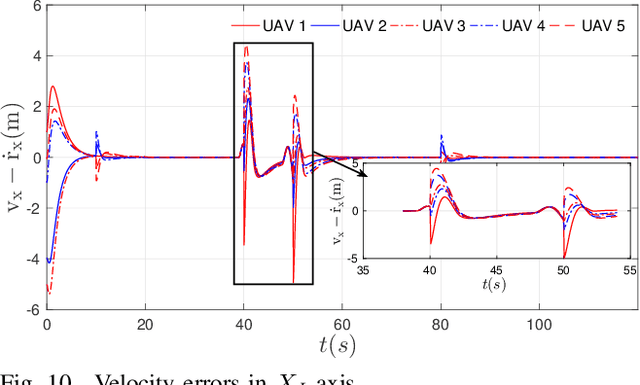
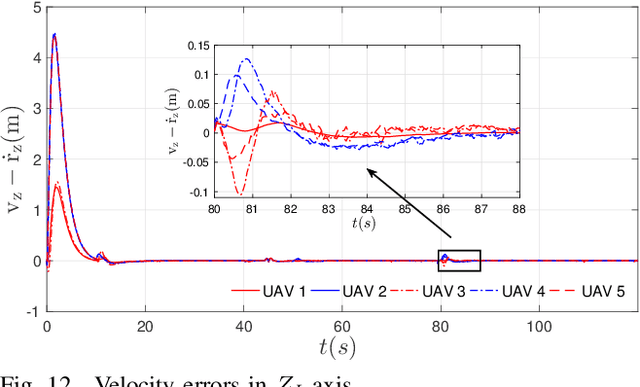
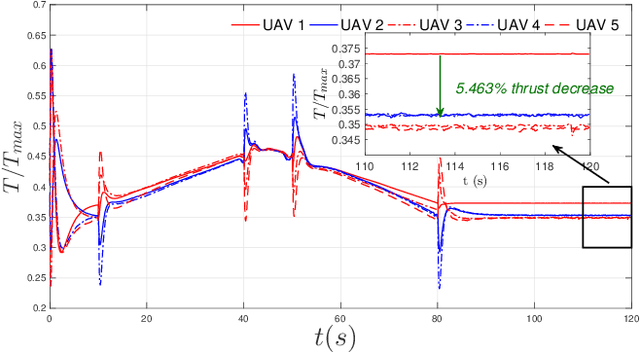
Robust cooperative formation control is investigated in this paper for fixed-wing unmanned aerial vehicles in close formation flight to save energy. A novel cooperative control method is developed. The concept of virtual structure is employed to resolve the difficulty in designing virtual leaders for a large number of UAVs in formation flight. To improve the transient performance, desired trajectories are passed through a group of cooperative filters to generate smooth reference signals, namely the states of the virtual leaders. Model uncertainties due to aerodynamic couplings among UAVs are estimated and compensated using uncertainty and disturbance observers. The entire design, therefore, contains three major components: cooperative filters for motion planning, baseline cooperative control, and uncertainty and disturbance observation. The proposed formation controller could at least secure ultimate bounded control performance for formation tracking. If certain conditions are satisfied, asymptotic formation tracking control could be obtained. Major contributions of this paper lie in two aspects: 1) the difficulty in designing virtual leaders is resolved in terms of the virtual structure concept; 2) a robust cooperative controller is proposed for close formation flight of a large number of UAVs suffering from aerodynamic couplings in between. The efficiency of the proposed design will be demonstrated using numerical simulations of five UAVs in close formation flight.
Robust nonlinear control of close formation flight
Apr 16, 2019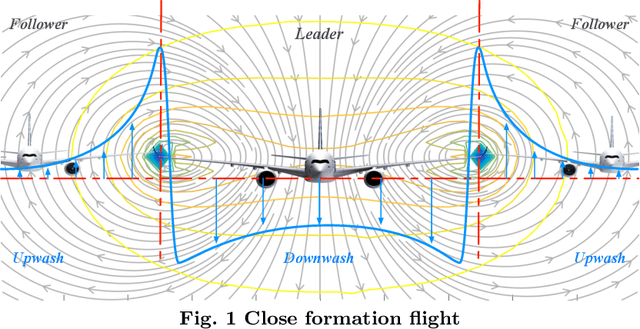
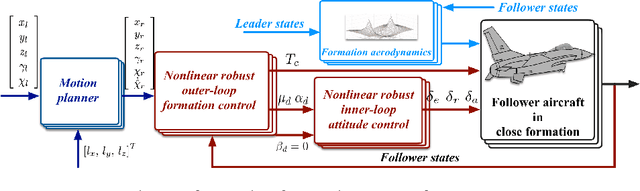
This paper investigates the robust nonlinear close formation control problem. It aims to achieve precise position control at dynamic flight operation for a follower aircraft under the aerodynamic impact due to the trailing vortices generated by a leader aircraft. One crucial concern is the control robustness that ensures the boundedness of position error subject to uncertainties and disturbances to be regulated with accuracy. This paper develops a robust nonlinear formation control algorithm to fulfill precise close formation tracking control. The proposed control algorithm consists of baseline control laws and disturbance observers. The baseline control laws are employed to stabilize the nonlinear dynamics of close formation flight, while the disturbance observers are introduced to compensate system uncertainties and formation-related aerodynamic disturbances. The position control performance can be guaranteed within the desired boundedness to harvest enough drag reduction for a follower aircraft in close formation using the proposed design. The efficacy of the proposed design is demonstrated via numerical simulations of close formation flight of two aircraft.