 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRequirements-driven Test Generation for Autonomous Vehicles with Machine Learning Components
Aug 02, 2019
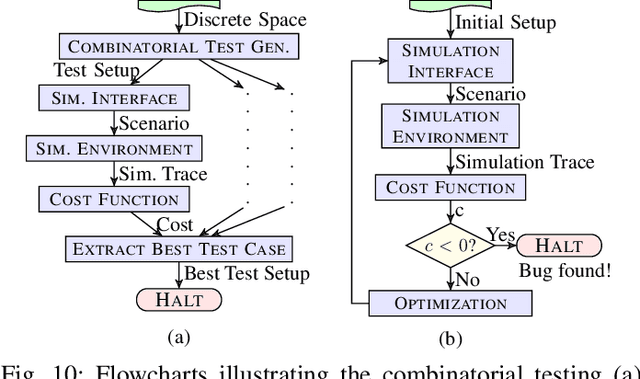
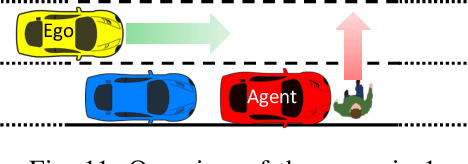
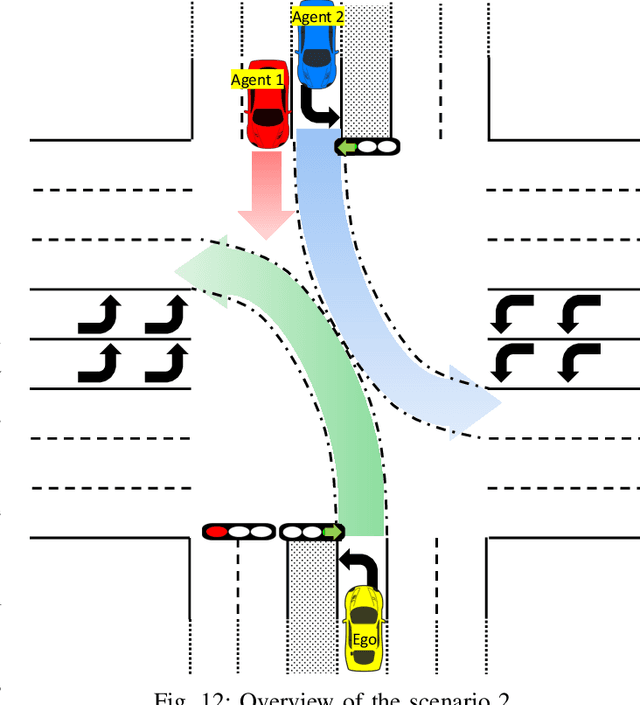
Autonomous vehicles are complex systems that are challenging to test and debug. A requirements-driven approach to the development process can decrease the resources required to design and test these systems, while simultaneously increasing the reliability. We present a testing framework that uses signal temporal logic (STL), which is a precise and unambiguous requirements language. Our framework evaluates test cases against the STL formulae and additionally uses the requirements to automatically identify test cases that fail to satisfy the requirements. One of the key features of our tool is the support for machine learning (ML) components in the system design, such as deep neural networks. The framework allows evaluation of the control algorithms, including the ML components, and it also includes models of CCD camera, lidar, and radar sensors, as well as the vehicle environment. We use multiple methods to generate test cases, including covering arrays, which is an efficient method to search discrete variable spaces. The resulting test cases can be used to debug the controller design by identifying controller behaviors that do not satisfy requirements. The test cases can also enhance the testing phase of development by identifying critical corner cases that correspond to the limits of the system's allowed behaviors. We present STL requirements for an autonomous vehicle system, which capture both component-level and system-level behaviors. Additionally, we present three driving scenarios and demonstrate how our requirements-driven testing framework can be used to identify critical system behaviors, which can be used to support the development process.
Simulation-based Adversarial Test Generation for Autonomous Vehicles with Machine Learning Components
Jul 25, 2018
Many organizations are developing autonomous driving systems, which are expected to be deployed at a large scale in the near future. Despite this, there is a lack of agreement on appropriate methods to test, debug, and certify the performance of these systems. One of the main challenges is that many autonomous driving systems have machine learning components, such as deep neural networks, for which formal properties are difficult to characterize. We present a testing framework that is compatible with test case generation and automatic falsification methods, which are used to evaluate cyber-physical systems. We demonstrate how the framework can be used to evaluate closed-loop properties of an autonomous driving system model that includes the ML components, all within a virtual environment. We demonstrate how to use test case generation methods, such as covering arrays, as well as requirement falsification methods to automatically identify problematic test scenarios. The resulting framework can be used to increase the reliability of autonomous driving systems.
Reasoning about Safety of Learning-Enabled Components in Autonomous Cyber-physical Systems
Apr 11, 2018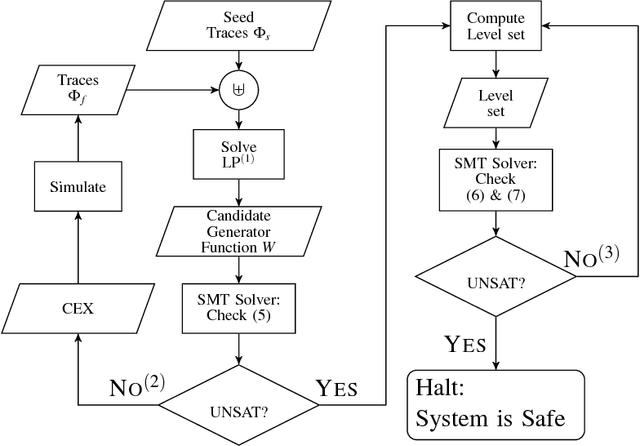
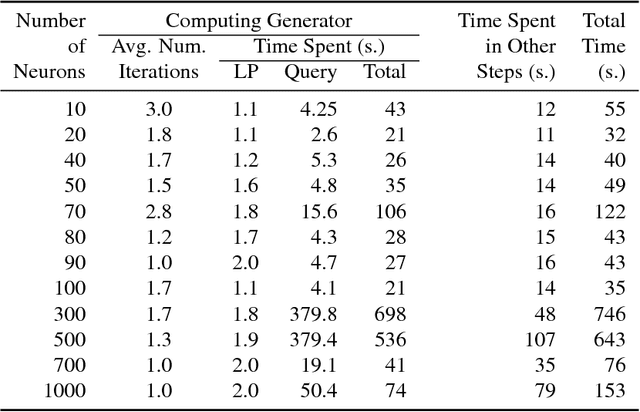
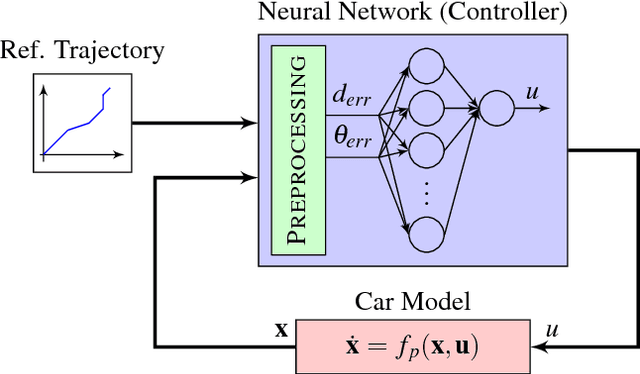
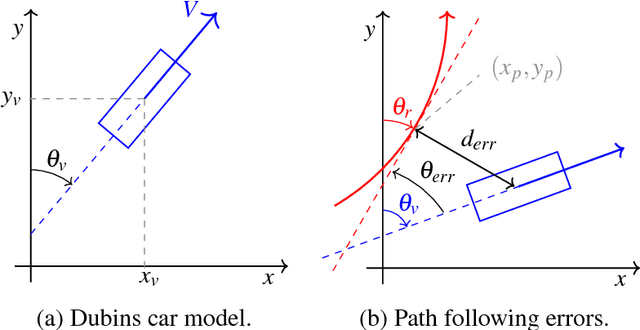
We present a simulation-based approach for generating barrier certificate functions for safety verification of cyber-physical systems (CPS) that contain neural network-based controllers. A linear programming solver is utilized to find a candidate generator function from a set of simulation traces obtained by randomly selecting initial states for the CPS model. A level set of the generator function is then selected to act as a barrier certificate for the system, meaning it demonstrates that no unsafe system states are reachable from a given set of initial states. The barrier certificate properties are verified with an SMT solver. This approach is demonstrated on a case study in which a Dubins car model of an autonomous vehicle is controlled by a neural network to follow a given path.