 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Resolution Factor Graph Based Stereo Correspondence Algorithm
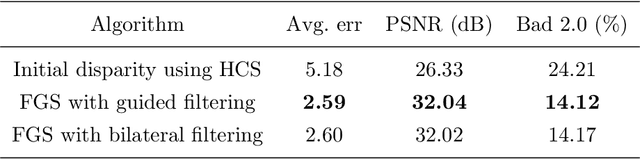
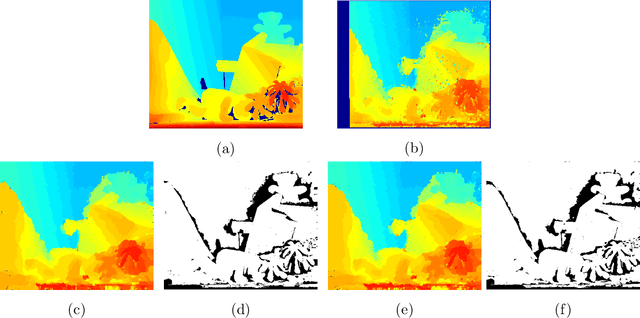
Feb 02, 2022A dense depth-map of a scene at an arbitrary view orientation can be estimated from dense view correspondences among multiple lower-dimensional views of the scene. These low-dimensional view correspondences are dependent on the geometrical relationship among the views and the scene. Determining dense view correspondences is difficult in part due to presence of homogeneous regions in the scene and due to presence of occluded regions and illumination differences among the views. We present a new multi-resolution factor graph-based stereo matching algorithm (MR-FGS) that utilizes both intra- and inter-resolution dependencies among the views as well as among the disparity estimates. The proposed framework allows exchange of information among multiple resolutions of the correspondence problem and is useful for handling larger homogeneous regions in a scene. The MR-FGS algorithm was evaluated qualitatively and quantitatively using stereo pairs in the Middlebury stereo benchmark dataset based on commonly used performance measures. When compared to a recently developed factor graph model (FGS), the MR-FGS algorithm provided more accurate disparity estimates without requiring the commonly used post-processing procedure known as the left-right consistency check. The multi-resolution dependency constraint within the factor-graph model significantly improved contrast along depth boundaries in the MR-FGS generated disparity maps.
A Novel Factor Graph-Based Optimization Technique for Stereo Correspondence Estimation
Sep 22, 2021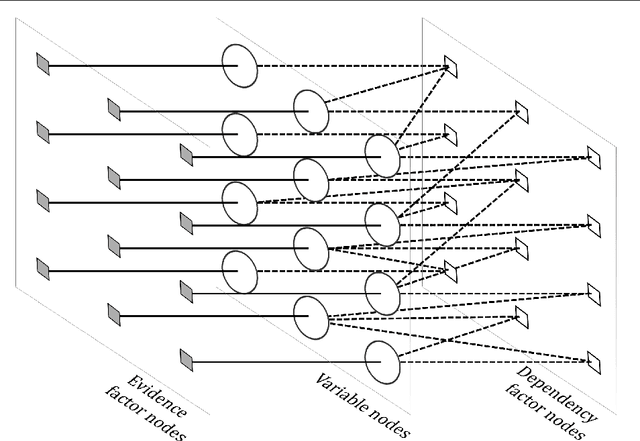
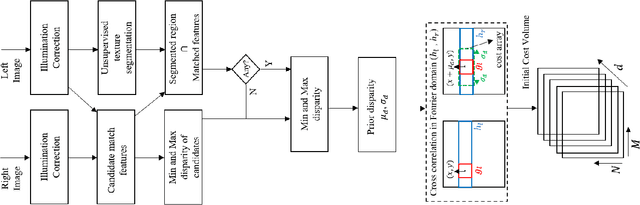
Dense disparities among multiple views is essential for estimating the 3D architecture of a scene based on the geometrical relationship among the scene and the views or cameras. Scenes with larger extents of heterogeneous textures, differing scene illumination among the multiple views and with occluding objects affect the accuracy of the estimated disparities. Markov random fields (MRF) based methods for disparity estimation address these limitations using spatial dependencies among the observations and among the disparity estimates. These methods, however, are limited by spatially fixed and smaller neighborhood systems or cliques. In this work, we present a new factor graph-based probabilistic graphical model for disparity estimation that allows a larger and a spatially variable neighborhood structure determined based on the local scene characteristics. We evaluated our method using the Middlebury benchmark stereo datasets and the Middlebury evaluation dataset version 3.0 and compared its performance with recent state-of-the-art disparity estimation algorithms. The new factor graph-based method provided disparity estimates with higher accuracy when compared to the recent non-learning- and learning-based disparity estimation algorithms. In addition to disparity estimation, our factor graph formulation can be useful for obtaining maximum a posteriori solution to optimization problems with complex and variable dependency structures as well as for other dense estimation problems such as optical flow estimation.