 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep learning for conifer/deciduous classification of airborne LiDAR 3D point clouds representing individual trees
Feb 24, 2018



The purpose of this study was to investigate the use of deep learning for coniferous/deciduous classification of individual trees from airborne LiDAR data. To enable efficient processing by a deep convolutional neural network (CNN), we designed two discrete representations using leaf-off and leaf-on LiDAR data: a digital surface model with four channels (DSMx4) and a set of four 2D views (4x2D). A training dataset of labeled tree crowns was generated via segmentation of tree crowns, followed by co-registration with field data. Potential mislabels due to GPS error or tree leaning were corrected using a statistical ensemble filtering procedure. Because the training data was heavily unbalanced (~8% conifers), we trained an ensemble of CNNs on random balanced sub-samples of augmented data (180 rotational variations per instance). The 4x2D representation yielded similar classification accuracies to the DSMx4 representation (~82% coniferous and ~90% deciduous) while converging faster. The data augmentation improved the classification accuracies, but more real training instances (especially coniferous) likely results in much stronger improvements. Leaf-off LiDAR data were the primary source of useful information, which is likely due to the perennial nature of coniferous foliage. LiDAR intensity values also proved to be useful, but normalization yielded no significant improvements. Lastly, the classification accuracies of overstory trees (~90%) were more balanced than those of understory trees (~90% deciduous and ~65% coniferous), which is likely due to the incomplete capture of understory tree crowns via airborne LiDAR. Automatic derivation of optimal features via deep learning provide the opportunity for remarkable improvements in prediction tasks where captured data are not friendly to human visual system - likely yielding sub-optimal human-designed features.
Forest understory trees can be segmented accurately within sufficiently dense airborne laser scanning point clouds
Aug 03, 2017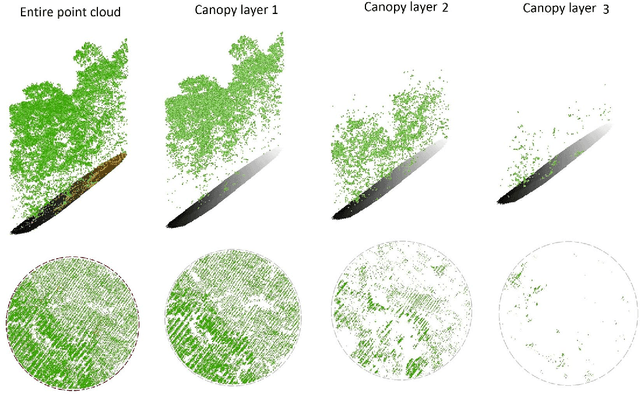


Airborne laser scanning (LiDAR) point clouds over large forested areas can be processed to segment individual trees and subsequently extract tree-level information. Existing segmentation procedures typically detect more than 90% of overstory trees, yet they barely detect 60% of understory trees because of the occlusion effect of higher canopy layers. Although understory trees provide limited financial value, they are an essential component of ecosystem functioning by offering habitat for numerous wildlife species and influencing stand development. Here we model the occlusion effect in terms of point density. We estimate the fractions of points representing different canopy layers (one overstory and multiple understory) and also pinpoint the required density for reasonable tree segmentation (where accuracy plateaus). We show that at a density of ~170 pt/m-sqr understory trees can likely be segmented as accurately as overstory trees. Given the advancements of LiDAR sensor technology, point clouds will affordably reach this required density. Using modern computational approaches for big data, the denser point clouds can efficiently be processed to ultimately allow accurate remote quantification of forest resources. The methodology can also be adopted for other similar remote sensing or advanced imaging applications such as geological subsurface modelling or biomedical tissue analysis.
* arXiv admin note: text overlap with arXiv:1701.00169
Remote sensing of forests using discrete return airborne LiDAR
Jul 17, 2017



Airborne discrete return light detection and ranging (LiDAR) point clouds covering forested areas can be processed to segment individual trees and retrieve their morphological attributes. Segmenting individual trees in natural deciduous forests however remained a challenge because of the complex and multi-layered canopy. In this chapter, we present (i) a robust segmentation method that avoids a priori assumptions about the canopy structure, (ii) a vertical canopy stratification procedure that improves segmentation of understory trees, (iii) an occlusion model for estimating the point density of each canopy stratum, and (iv) a distributed computing approach for efficient processing at the forest level. When applied to the University of Kentucky Robinson Forest, the segmentation method detected about 90% of overstory and 47% of understory trees with over-segmentation rates of 14% and 2%. Stratifying the canopy improved the detection rate of understory trees to 68% at the cost of increasing their over-segmentations to 16%. According to our occlusion model, a point density of ~170 pt/m-sqr is needed to segment understory trees as accurately as overstory trees. Lastly, using the distributed approach, we segmented about two million trees in the 7,440-ha forest in 2.5 hours using 192 processors, which is 167 times faster than using a single processor. Keywords: individual tree segmentation, multi-layered stand, vertical canopy stratification, segmentation evaluation, point density, canopy occlusion effect, big data, distributed computing.
Vertical stratification of forest canopy for segmentation of under-story trees within small-footprint airborne LiDAR point clouds
Jul 15, 2017

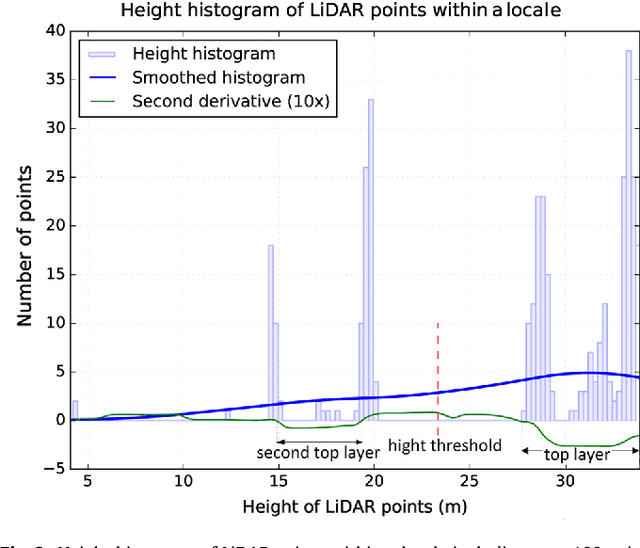

Airborne LiDAR point cloud representing a forest contains 3D data, from which vertical stand structure even of understory layers can be derived. This paper presents a tree segmentation approach for multi-story stands that stratifies the point cloud to canopy layers and segments individual tree crowns within each layer using a digital surface model based tree segmentation method. The novelty of the approach is the stratification procedure that separates the point cloud to an overstory and multiple understory tree canopy layers by analyzing vertical distributions of LiDAR points within overlapping locales. The procedure does not make a priori assumptions about the shape and size of the tree crowns and can, independent of the tree segmentation method, be utilized to vertically stratify tree crowns of forest canopies. We applied the proposed approach to the University of Kentucky Robinson Forest - a natural deciduous forest with complex and highly variable terrain and vegetation structure. The segmentation results showed that using the stratification procedure strongly improved detecting understory trees (from 46% to 68%) at the cost of introducing a fair number of over-segmented understory trees (increased from 1% to 16%), while barely affecting the overall segmentation quality of overstory trees. Results of vertical stratification of the canopy showed that the point density of understory canopy layers were suboptimal for performing a reasonable tree segmentation, suggesting that acquiring denser LiDAR point clouds would allow more improvements in segmenting understory trees. As shown by inspecting correlations of the results with forest structure, the segmentation approach is applicable to a variety of forest types.
A robust approach for tree segmentation in deciduous forests using small-footprint airborne LiDAR data
Jan 01, 2017


This paper presents a non-parametric approach for segmenting trees from airborne LiDAR data in deciduous forests. Based on the LiDAR point cloud, the approach collects crown information such as steepness and height on-the-fly to delineate crown boundaries, and most importantly, does not require a priori assumptions of crown shape and size. The approach segments trees iteratively starting from the tallest within a given area to the smallest until all trees have been segmented. To evaluate its performance, the approach was applied to the University of Kentucky Robinson Forest, a deciduous closed-canopy forest with complex terrain and vegetation conditions. The approach identified 94% of dominant and co-dominant trees with a false detection rate of 13%. About 62% of intermediate, overtopped, and dead trees were also detected with a false detection rate of 15%. The overall segmentation accuracy was 77%. Correlations of the segmentation scores of the proposed approach with local terrain and stand metrics was not significant, which is likely an indication of the robustness of the approach as results are not sensitive to the differences in terrain and stand structures.