 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSolving Minimal Problems Without Matrix Inversion Using FFT-Based Interpolation
May 07, 2026Estimating camera geometry typically involves solving minimal problems formulated as systems of multivariate polynomial equations, which often pose computational challenges when using existing Gröbner-basis or resultant-based methods due to matrix inversion needed in the online solver. Here we propose a sampling-based, matrix inversion-free method that constructs the solvers using sparse hidden-variable resultants. The determinant polynomial in the hidden variable is efficiently reconstructed via inverse fast Fourier transform interpolation from sampled evaluations, avoiding symbolic expansion. Solving this polynomial yields the hidden variable, and the remaining unknowns are recovered by identifying rank-1 deficient submatrices and applying Cramer's rule. A greatest common divisor-based criterion ensures robust submatrix identification under noise. Experiments on diverse minimal problems demonstrate that the proposed solver achieves strong numerical stability and competitive runtime, particularly for small-scale problems, providing a practical alternative to traditional Gröbner-basis and resultant-based solvers.
A Conic Transformation Approach for Solving the Perspective-Three-Point Problem
Apr 02, 2025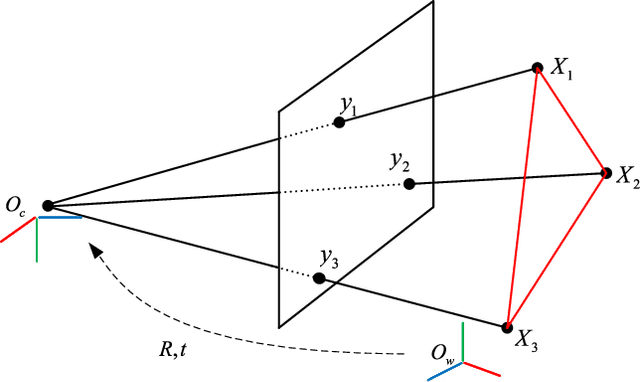
We propose a conic transformation method to solve the Perspective-Three-Point (P3P) problem. In contrast to the current state-of-the-art solvers, which formulate the P3P problem by intersecting two conics and constructing a degenerate conic to find the intersection, our approach builds upon a new formulation based on a transformation that maps the two conics to a new coordinate system, where one of the conics becomes a standard parabola in a canonical form. This enables expressing one variable in terms of the other variable, and as a consequence, substantially simplifies the problem of finding the conic intersection. Moreover, the polynomial coefficients are fast to compute, and we only need to determine the real-valued intersection points, which avoids the requirement of using computationally expensive complex arithmetic. While the current state-of-the-art methods reduce the conic intersection problem to solving a univariate cubic equation, our approach, despite resulting in a quartic equation, is still faster thanks to this new simplified formulation. Extensive evaluations demonstrate that our method achieves higher speed while maintaining robustness and stability comparable to state-of-the-art methods.