 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRigid and Articulated Point Registration with Expectation Conditional Maximization
Dec 09, 2020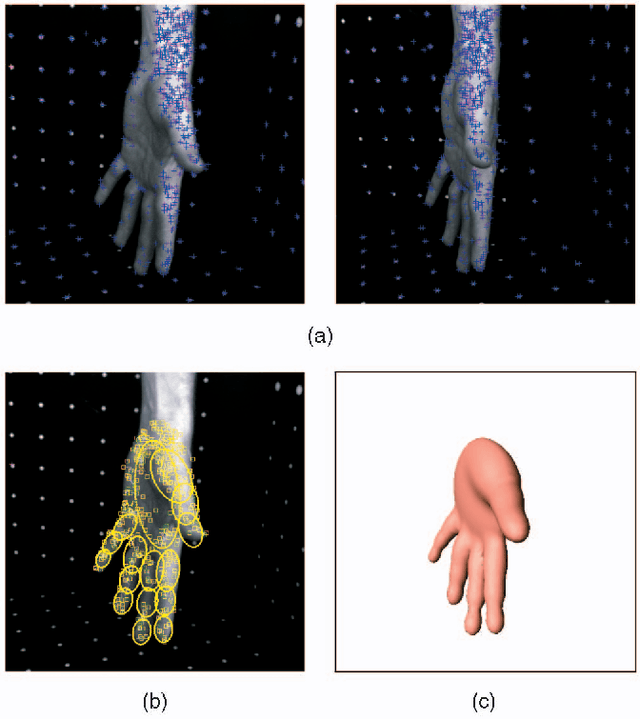
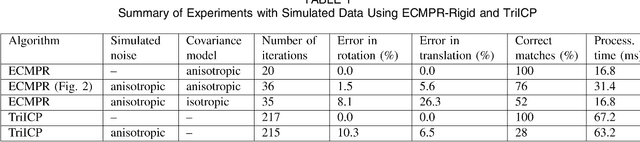
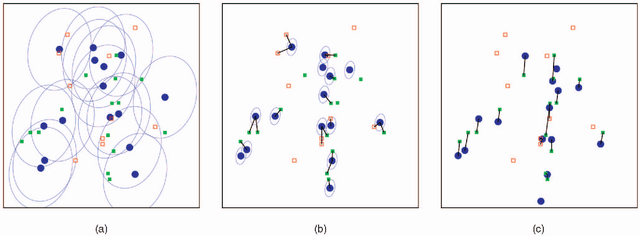
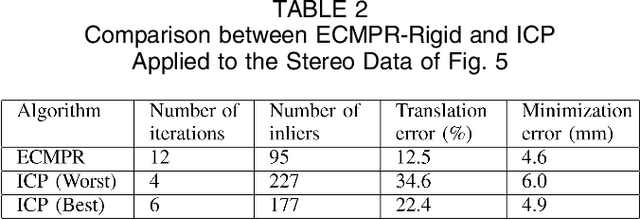
This paper addresses the issue of matching rigid and articulated shapes through probabilistic point registration. The problem is recast into a missing data framework where unknown correspondences are handled via mixture models. Adopting a maximum likelihood principle, we introduce an innovative EM-like algorithm, namely the Expectation Conditional Maximization for Point Registration (ECMPR) algorithm. The algorithm allows the use of general covariance matrices for the mixture model components and improves over the isotropic covariance case. We analyse in detail the associated consequences in terms of estimation of the registration parameters, and we propose an optimal method for estimating the rotational and translational parameters based on semi-definite positive relaxation. We extend rigid registration to articulated registration. Robustness is ensured by detecting and rejecting outliers through the addition of a uniform component to the Gaussian mixture model at hand. We provide an in-depth analysis of our method and we compare it both theoretically and experimentally with other robust methods for point registration.
Human Motion Tracking by Registering an Articulated Surface to 3-D Points and Normals
Dec 08, 2020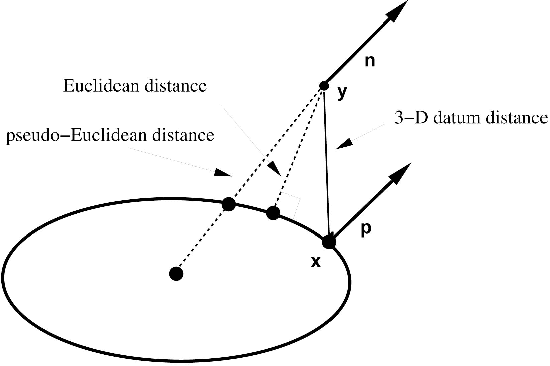
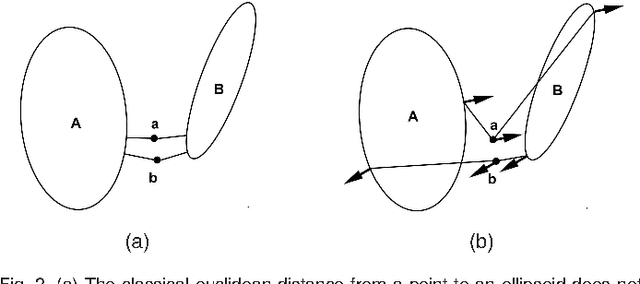
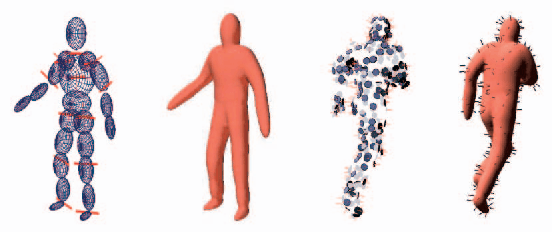
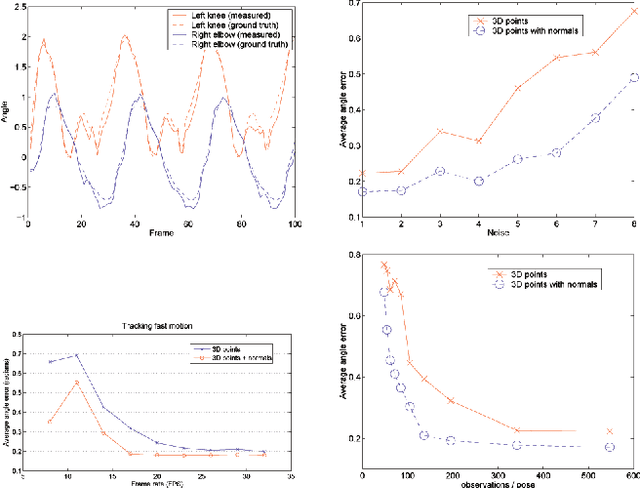
We address the problem of human motion tracking by registering a surface to 3-D data. We propose a method that iteratively computes two things: Maximum likelihood estimates for both the kinematic and free-motion parameters of a kinematic human-body representation, as well as probabilities that the data are assigned either to a body part, or to an outlier cluster. We introduce a new metric between observed points and normals on one side, and a parameterized surface on the other side, the latter being defined as a blending over a set of ellipsoids. We claim that this metric is well suited when one deals with either visual-hull or visual-shape observations. We illustrate the method by tracking human motions using sparse visual-shape data (3-D surface points and normals) gathered from imperfect silhouettes.