 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA cell-decomposition based path planner for 3D navigation in constrained workspaces
May 11, 2026This paper proposes a cell decomposition algorithm for binary occupancy grids that ensures mutual complete visibility from each cell to at least one adjacent cell. This decomposition establishes a simplified framework for verifying path feasibility that can be easily embedded in optimization problems. To illustrate its utility, we formulate both second-order cone programs (SOCP) and their mixed-integer variant (MISOCP) within the proposed framework. Furthermore, we propose the KSP-SOCP method, which combines Yen's k-shortest path algorithm with the SOCP, achieving improved solutions compared to a standard SOCP approach while avoiding the computational burden of MISOCP. The cell decomposition algorithm, KSP-SOCP, and MISOCP approaches were evaluated in 9 city-like workspaces. The decomposition efficiently partitioned each map, enabling both optimization methods to compute feasible paths. The proposed KSP-SOCP achieved time performance comparable to the MISOCP while requiring less memory, making it highly suitable for large-scale problems.
Suspended Load Path Tracking Control Using a Tilt-rotor UAV Based on Zonotopic State Estimation
Sep 20, 2018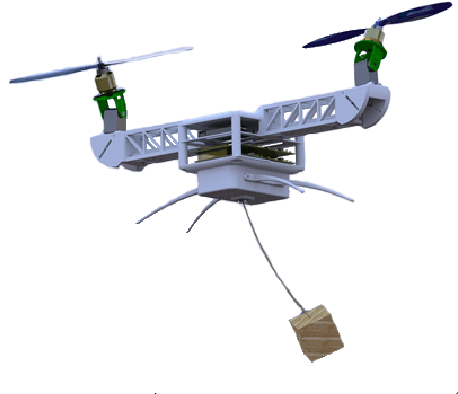
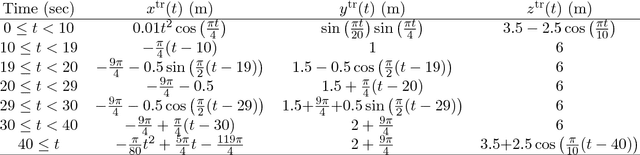
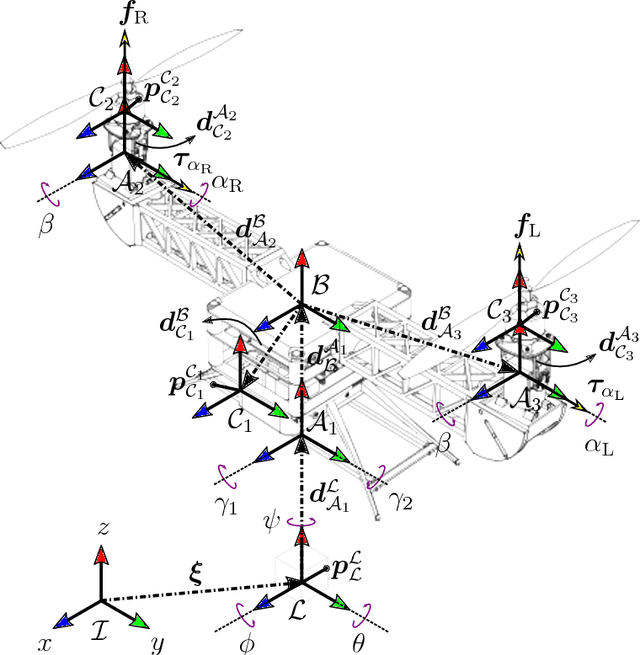
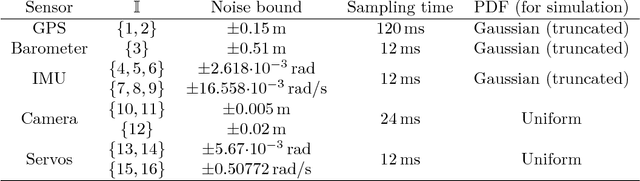
This work addresses the problem of path tracking control of a suspended load using a tilt-rotor UAV. The main challenge in controlling this kind of system arises from the dynamic behavior imposed by the load, which is usually coupled to the UAV by means of a rope, adding unactuated degrees of freedom to the whole system. Furthermore, to perform the load transportation it is often needed the knowledge of the load position to accomplish the task. Since available sensors are commonly embedded in the mobile platform, information on the load position may not be directly available. To solve this problem in this work, initially, the kinematics of the multi-body mechanical system are formulated from the load's perspective, from which a detailed dynamic model is derived using the Euler-Lagrange approach, yielding a highly coupled, nonlinear state-space representation of the system, affine in the inputs, with the load's position and orientation directly represented by state variables. A zonotopic state estimator is proposed to solve the problem of estimating the load position and orientation, which is formulated based on sensors located at the aircraft, with different sampling times, and unknown-but-bounded measurement noise. To solve the path tracking problem, a discrete-time mixed $\mathcal{H}_2/\mathcal{H}_\infty$ controller with pole-placement constraints is designed with guaranteed time-response properties and robust to unmodeled dynamics, parametric uncertainties, and external disturbances. Results from numerical experiments, performed in a platform based on the Gazebo simulator and on a Computer Aided Design (CAD) model of the system, are presented to corroborate the performance of the zonotopic state estimator along with the designed controller.