 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimal control of differentially flat underactuated planar robots in the perspective of oscillation mitigation
Mar 16, 2026Underactuated robots are characterized by a larger number of degrees of freedom than actuators and if they are designed with a specific mass distribution, they can be controlled by means of differential flatness theory. This structural property enables the development of lightweight and cost-effective robotic systems with enhanced dexterity. However, a key challenge lies in managing the passive joints, whose control demands precise and comprehensive dynamic modeling of the system. To simplify dynamic models, particularly for low-speed trajectories, friction is often neglected. While this assumption simplifies analysis and control design, it introduces residual oscillations of the end-effector about the target position. In this paper, the possibility of using optimal control along with differential flatness control is investigated to improve the tracking of the planned trajectories. First, the study was carried out through formal analysis, and then, it was validated by means of numerical simulations. Results highlight that optimal control can be used to plan the flat variables considering different (quadratic) performance indices: control effort, i.e. motor torque, and potential energy of the considered underactuated joint. Moreover, the minimization of potential energy can be used to design motion laws that are robust against variation of the stiffness and damping of the underactuated joint, thus reducing oscillations in the case of stiffness/damping mismatch.
Cutaneous Force Feedback as a Sensory Subtraction Technique in Haptics
Nov 27, 2012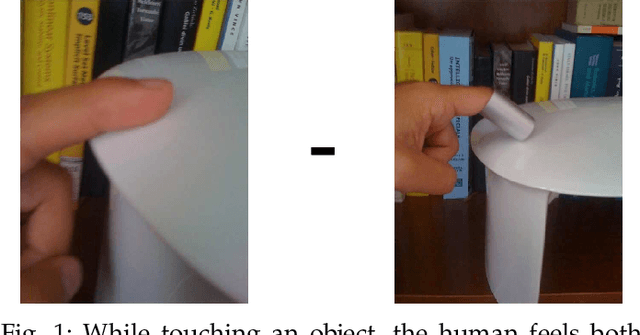
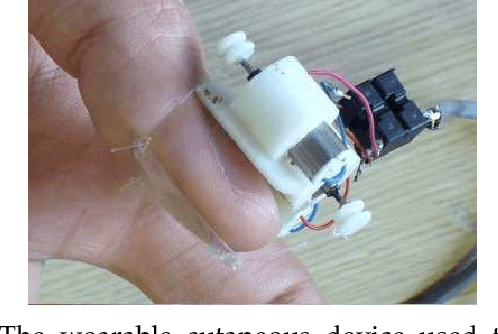
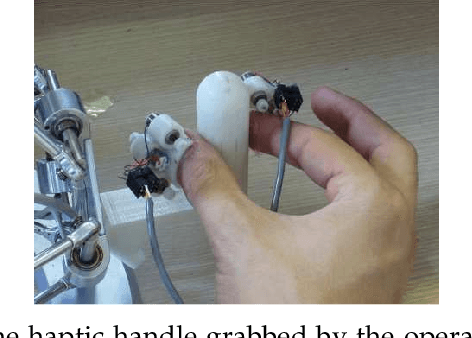
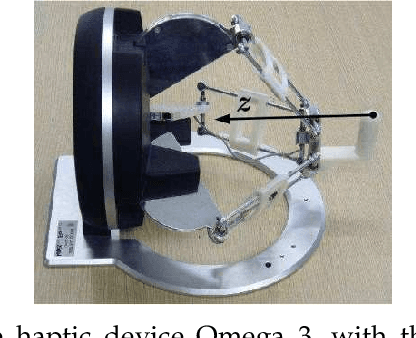
A novel sensory substitution technique is presented. Kinesthetic and cutaneous force feedback are substituted by cutaneous feedback (CF) only, provided by two wearable devices able to apply forces to the index finger and the thumb, while holding a handle during a teleoperation task. The force pattern, fed back to the user while using the cutaneous devices, is similar, in terms of intensity and area of application, to the cutaneous force pattern applied to the finger pad while interacting with a haptic device providing both cutaneous and kinesthetic force feedback. The pattern generated using the cutaneous devices can be thought as a subtraction between the complete haptic feedback (HF) and the kinesthetic part of it. For this reason, we refer to this approach as sensory subtraction instead of sensory substitution. A needle insertion scenario is considered to validate the approach. The haptic device is connected to a virtual environment simulating a needle insertion task. Experiments show that the perception of inserting a needle using the cutaneous-only force feedback is nearly indistinguishable from the one felt by the user while using both cutaneous and kinesthetic feedback. As most of the sensory substitution approaches, the proposed sensory subtraction technique also has the advantage of not suffering from stability issues of teleoperation systems due, for instance, to communication delays. Moreover, experiments show that the sensory subtraction technique outperforms sensory substitution with more conventional visual feedback (VF).